
白平衡是电视摄像领域一个非常重要的概念,通过它可以解决色彩还原和色调处理的一系列问题。白平衡是随着电子影像再现色彩真实而产生的,在专业摄像领域白平衡应用的较早,现在家用电子产品(家用摄像机、数码照相机)中也广泛地使用,然而技术的发展使得白平衡调整变得越来越简单容易,但许多使用者还不甚了解白平衡的工作原理,理解上存在诸多误区。它是实现摄像机图像能精确反映被摄物的色彩状况,有手动白平衡和自动白平衡等方式,本文简要的介绍了几种自动白平衡算法。
一、原始的灰度世界算法
灰度世界算法(Gray World)是以灰度世界假设为基础的,该假设认为对于一幅有着大量色彩变化的图像, R、 G、 B 三个分量的平均值趋于同一个灰度K。一般有两种方法来确定该灰度。
(1)直接给定为固定值, 取其各通道最大值的一半,即取为127或128;
(2)令 K = (Raver+Gaver+Baver)/3,其中Raver,Gaver,Baver分别表示红、 绿、 蓝三个通道的平均值。
算法的第二步是分别计算各通道的增益:
Kr=K/Raver;
Kg=K/Gaver;
Kb=K/Baver;
算法第三步为根据Von Kries 对角模型,对于图像中的每个像素R、G、B,计算其结果值:
Rnew = R * Kr;
Gnew = G * Kg;
Bnew = B * Kb;
对于上式,计算中可能会存在溢出(>255,不会出现小于0的)现象,处理方式有两种。
a、 直接将像素设置为255,这可能会造成图像整体偏白。
b、 计算所有Rnew、Gnew、Bnew的最大值,然后利用该最大值将将计算后数据重新线性映射到[0,255]内。实践证明这种方式将会使图像整体偏暗,建议采用第一种方案。
一般来说,灰度世界算法的效果还是比较好的呢,并且该算法的执行速度非常之快,目前也存在了不少对该算法进行改进的效果,有时间我在整理一下。 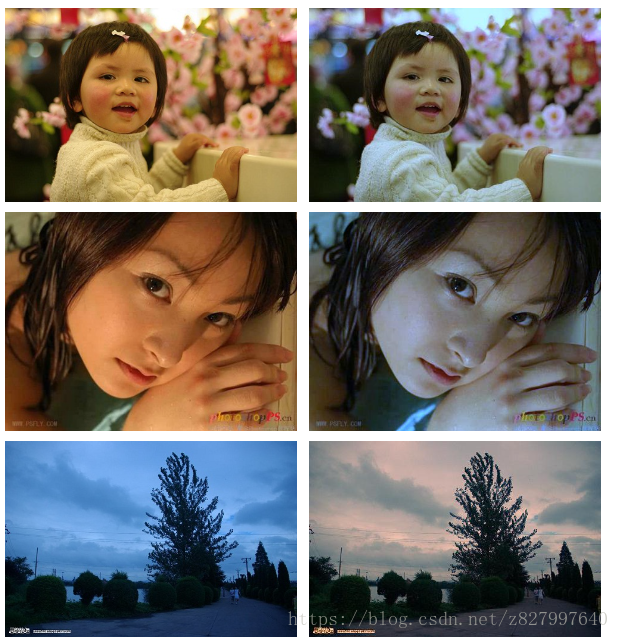
二、完美反射算法
当初写这个代码的时候的一些参考文献一下子也找不到了,就从已经写好的代码中描述下该算法的过程吧。
原理:完美全反射理论perfect Reflector假设图像上最亮点就是白点,并以此白点为参考对图像进行自动白平衡,最亮点定义为R+G+B的最大值,具体编码步骤如下:
(1)计算每个像素的R\G\B之和,并保存到一临时内存块中。
for (Y = 0; Y < Height; Y++)
{
Pointer = bmp.Pointer + Y * Stride; for (X = 0; X < Width; X++)
{
Sum = (short)(*(Pointer) + *(Pointer + 1) + *(Pointer + 2)); // R+G+B
HistRGB[Sum]++;
*SumP = (short)Sum;
Pointer += 3;
SumP++;
}
}(2)按R+G+B值的大小计算出其前10%或其他Ratio的白色参考点的的阈值T。12
for (Y = 767; Y >= 0; Y--){
Sum += HistRGB[Y]; if (Sum > Width * Height * Ratio / 100)
{
Threshold = Y; break;
}
}(3)遍历图像中的每个点,计算其中R+G+B值大于T的所有点的R\G\B分量的累积和的平均值。12
for (Y = 0; Y < Height; Y++)
{
Pointer = bmp.Pointer + Y * Stride; for (X = 0; X < Width; X++)
{ if (*SumP > Threshold)
{
AvgB += *Pointer;
AvgG += *(Pointer + 1);
AvgR += *(Pointer + 2); // 为获得增益做准备
Amount++;
}
Pointer += 3;
SumP++;
}
}
AvgB /= Amount;
AvgG /= Amount;
AvgR /= Amount; (4)对每个点将像素量化到[0,255]之间。
for (Y = 0; Y < Height; Y++)
{
Pointer = bmp.Pointer + Y * Stride; for (X = 0; X < Width; X++)
{
Blue = *Pointer * MaxValue / AvgB; // 另外一种算法需要先计算不抑制重新计算的RGB的范围,然后求RGB的最大值,如果最大值大于255,则所有的结果都要除以最大值在乘以255,但实际表明该算法、 不合适;
Green = *(Pointer + 1) * MaxValue / AvgG;
Red = *(Pointer + 2) * MaxValue / AvgR; if (Red > 255) Red = 255; else if (Red < 0) Red = 0; // 这里需要判断,因为RGB空间所有的颜色转换到YCbCr后,并不是填充满了0-255的范围的,反转过去就会存在一些溢出的点。
if (Green > 255) Green = 255; else if (Green < 0) Green = 0; // 编译后应该比三目运算符的效率高
if (Blue > 255) Blue = 255; else if (Blue < 0) Blue = 0;
*Pointer = (byte)Blue;
*(Pointer + 1) = (byte)Green;
*(Pointer + 2) = (byte)Red;
Pointer += 3;
}
}
从效果上看,该算法应该比灰度世界的效果要好些,但是也还是受到Ratio这个参数的影像。特别是第二个图片,过高的Ration导致图片过于泛白。这个问题可以还是最后量化的哪一步引起的,我会抽空再研究一下其他的量化方式,尽量降低Ration的影响。
针对上述的第二步,看到很多matlab和VC的代码,有很多人居然先用快速排序对累加后的数据进行排序,然后再取其10%的最大值,对图像的数据进行排序,可能就是再快速的排序都快不起来吧,看到这,也许全国人民都笑了。
三、动态阈值算法
参考论文:A Novel Automatic White Balance Method For Digital Still Cameras
同经典的一些算法相同,算法分为两个步骤:白点检测和白点调整。
白点检测:
(1)为了增强算法的鲁棒性,原文将图像分成12部分,其中宽高比为4:3,关于这一点,我认为不合理,对图像不是通用的,后文再说。
(2)计算每个区域的Cb\Cr分量的平均值Mb/Mr。
(3)按下式计算每个区域的Cb\Cr分量的绝对差的累积值Db/Dr: 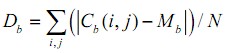
上式中N为每个区域的像素数。
(4)如果Db/Dr的值偏小,则我们忽略这一块,因为这表明这一块的颜色分布比较均匀,而这样的局部对于白平衡不好。这个偏小的准则我们稍微再谈。
(5)统计对于除了符合第四条的的其他区域的Mb/Mr/Db/Dr的平均值作为整幅图像的Mb/Mr/Db/Dr值。
关于这一条,原文的话是:The final Mb、Mr、Db、Dr are obtained by taking the average of those regions that pass this additional step。
我在实际中做的时候就是分别对每块进行的,似乎效果也还不错。
(6)按下述规则初步确定哪些点是属于白色参考点: 

(7)对于初步判断已经属于白色参考点的像素,按大小取其亮度值为前10%的位最终确定的白色参考点。
白点调整:
(1)计算白色参考点亮度值的平均值Raver,Gaver,Baver,(各通道分开计算)。
(2)按照以下各式计算每个通道的增益:

式中,Ymax就是YCbCr颜色空间中Y分量的在整幅图像中的最大值。12
(3)按照以下各式计算最终每个通道的颜色值: 
其中R/G/B为在原始的颜色空间中的值,注意这里要进行溢出检测的。12
简单的谈下白点检测的分块操作吧,原文把图像分成4*3的12快,这样做事针对于我们很多数码照片是这个比例的,如果通用,我觉得应该用每个块的大小来控制,比如每块为 100*100个像素。
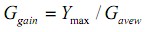
这个算法的效果如下: 
上三图表明:1、该算法效果非常好;2、对块大小不太敏感,因此非常适合于自动化操作。
关于RGB到YCbCr的快速转换,可以参考:颜色空间系列3: RGB和YCbCr颜色空间的转换及优化算法
由于在上述链接的文章中,YCbCr颜色空间已经被转换到[0,255],因此白色检测部分的第(6)条中的sign函数就不需要了。
同样,提供个编译好的文件给有兴趣研究该算法的朋友看看效果:
http://files.cnblogs.com/Imageshop/AutoWhiteBalance.zip
后记:
针对动态阈值法,很多朋友反映如果YCbCr的值量化在0到255之间的话会出现所有的像素都会被式(6)初步判断为白色参考点。这样前期的工作就失去了意义,算法就变成了类似于完美反射算法那了,稍微有点不同的地方就是两者选择两点的准则有所不同。虽然这样做的最终结果还算不错,但确实和论文的本意像违背了,后面经过实践,如果把YCbCr的值量化在-127到128之间,式6中的Sgn同样适用,则初步判断为白点的数会大量的减少,对于同一个图片,同一个参数两个算法的最终的效果比较如下:
更新后的下载链接依旧如下,以增加了修正后的功能。 





