-

- 孙三三 2020-02-16
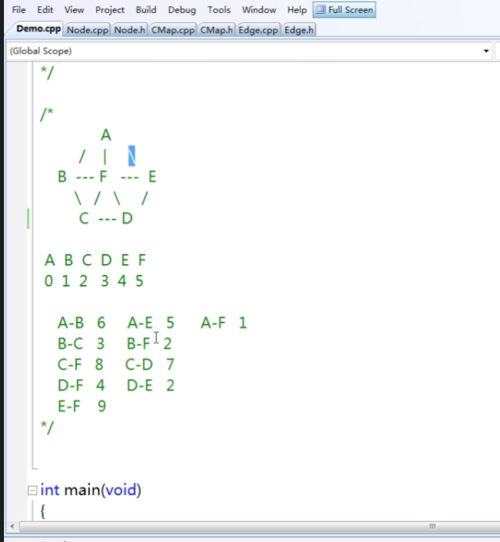
main.cpp: #include <iostream> #include "CMap.h" int main() { CMap *pMap = new CMap(6); Node *pNodeA = new Node('A'); Node *pNodeB = new Node('B'); Node *pNodeC = new Node('C'); Node *pNodeD = new Node('D'); Node *pNodeE = new Node('E'); Node *pNodeF = new Node('F'); pMap->addNode(pNodeA); pMap->addNode(pNodeB); pMap->addNode(pNodeC); pMap->addNode(pNodeD); pMap->addNode(pNodeE); pMap->addNode(pNodeF); //设置邻接矩阵 pMap->setValueToMatrixForUndirectedGraph(0,1,6); pMap->setValueToMatrixForUndirectedGraph(0,4,5); pMap->setValueToMatrixForUndirectedGraph(0,5,1); pMap->setValueToMatrixForUndirectedGraph(1,2,3); pMap->setValueToMatrixForUndirectedGraph(1,5,2); pMap->setValueToMatrixForUndirectedGraph(2,5,8); pMap->setValueToMatrixForUndirectedGraph(2,3,7); pMap->setValueToMatrixForUndirectedGraph(3,5,4); pMap->setValueToMatrixForUndirectedGraph(3,4,2); pMap->setValueToMatrixForUndirectedGraph(4,5,9); pMap->primTree(0); // pMap->printMatrix(); // // cout<<endl; // // pMap->depthFirstTraverse(0); // cout<<endl; // //广度遍历之前,由于之前的点都被表示为已经访问过 // pMap->resetNode(); // pMap->breadthFirstTraverse(0); return 0; }CMap.h: #ifndef INC_0214_CMAP_H #define INC_0214_CMAP_H #include <vector> #include "Node.h" #include "Edge.h" using namespace std; class CMap{ public: CMap(int capacity); ~CMap(); bool addNode(Node *pNode); //向图中加入顶点(结点) void resetNode(); //重置顶点 bool setValueToMatrixForDirectedGraph(int row,int col,int val = 1); //为有向图设置邻接矩阵 bool setValueToMatrixForUndirectedGraph(int row,int col,int val = 1); //为无向图设置邻接矩阵 void printMatrix(); //打印邻接矩阵 void depthFirstTraverse(int nodeIndex); //深度优先遍历 void breadthFirstTraverse(int nodeIndex); //广度优先遍历 void primTree(int nodeIndex);//Prim生成树 private: bool getValueFromMatrix(int row,int col,int &val); //从矩阵中获取权值 void breadthFirstTraverseImp(vector<int> preVec); //广度优先遍历实现函数 int getMinEdge(vector<Edge> edgeVec);//找最小边函数 private: int m_iCapacity; //图中最多可以容纳的顶点数 int m_iNodeCount; //已经添加的顶点(结点)个数 Node *m_pNodeArray; //用来指向一段内存,这段内存用来存放顶点数组 int *m_pMatrix; //用来存放邻接矩阵 Edge *m_pEdge;//用于保存最小边,需要在cpp文件中申请一段内存 }; #endif //INC_0214_CMAP_HCMap.cpp: #include "CMap.h" #include "Node.h" #include <iostream> #include <vector> using namespace std; CMap::CMap(int capacity) { m_iCapacity = capacity; m_iNodeCount = 0; m_pNodeArray = new Node[m_iCapacity]; m_pMatrix = new int[m_iCapacity * m_iCapacity]; memset(m_pMatrix,0,m_iCapacity * m_iCapacity * sizeof(int));//需要初始化将这个矩阵的各元素初始化为0; //也可以用for循环进行初始化:但是注意m_pMatrix是一个一维数组 // for(int i = 0;i < m_pMatrix*m_pMatrix;i++){ // m_pMatrix[i] = 0; // } //存放最小边的空间大小 m_pEdge = new Edge[m_iCapacity - 1]; } CMap::~CMap() {//针对析构函数中申请的内存进行释放 delete []m_pNodeArray; delete []m_pMatrix; } bool CMap::addNode(Node *pNode) { //向图中加入顶点(结点) if(pNode == NULL){ return NULL; } m_pNodeArray[m_iNodeCount].m_cData = pNode->m_cData;//内存在构造函数时就已经申请好了,只需要付值了 m_iNodeCount++; return true; } void CMap::resetNode() { //重置顶点 for(int i = 0;i < m_iNodeCount;i++){ m_pNodeArray[i].m_bIsVisited = false; } } bool CMap::setValueToMatrixForDirectedGraph(int row,int col,int val) { //为有向图设置邻接矩阵,函数声明时是int val = 1,但是定义时不加=1 if(row < 0 || row >= m_iCapacity){ return false; } if(col < 0 || col >= m_iCapacity){ return false; } m_pMatrix[row * m_iCapacity + col] = val; return true; } bool CMap::setValueToMatrixForUndirectedGraph(int row,int col,int val) { //为无向图设置邻接矩阵 if(row < 0 || row >= m_iCapacity){ return false; } if(col < 0 || col >= m_iCapacity){ return false; } m_pMatrix[row * m_iCapacity + col] = val; m_pMatrix[col * m_iCapacity + row] = val; return true; } void CMap::printMatrix(){ for(int i = 0;i < m_iCapacity;i++){ for(int k = 0; k < m_iCapacity;k++){ cout << m_pMatrix[i*m_iCapacity+k] << " "; } cout << endl; } } bool CMap::getValueFromMatrix(int row,int col,int &val){ if(row < 0 || row >= m_iCapacity){ return false; } if(col < 0 || col >= m_iCapacity){ return false; } val = m_pMatrix[row * m_iCapacity + col]; return true; } void CMap::depthFirstTraverse(int nodeIndex){//需要用深度优先遍历实现 int value = 0; cout << m_pNodeArray[nodeIndex].m_cData << " "; m_pNodeArray[nodeIndex].m_bIsVisited = true; for(int i = 0; i < m_iCapacity;i++){ getValueFromMatrix(nodeIndex,i,value);//注意引用的写法 if(value == 1){ if(m_pNodeArray[i].m_bIsVisited){ continue; } else{ depthFirstTraverse(i); } } else{ continue; } } } void CMap::breadthFirstTraverse(int nodeIndex){ cout << m_pNodeArray[nodeIndex].m_cData << " "; m_pNodeArray[nodeIndex].m_bIsVisited = true; //需要用数组来保存被访问过的结点的索引,这里使用vector,标准模板库需要将头文件加入 vector<int> curVec; curVec.push_back(nodeIndex); breadthFirstTraverseImp(curVec); } void CMap::breadthFirstTraverseImp(vector<int> preVec){ int value = 0;//用于去邻接矩阵取值,看是否为0 vector<int> curVec;//用来保存当前这一层的所有节点 for(int j = 0;j < (int)preVec.size();j++){ for(int i = 0; i < m_iCapacity;i++){ getValueFromMatrix(preVec[j],i,value); if(value != 0){//如果边存在,还要看对应顶点被访问过没 if(m_pNodeArray[i].m_bIsVisited){ continue; } else{//如果存在且没又被访问过 cout << m_pNodeArray[i].m_cData<<" "; m_pNodeArray[i].m_bIsVisited = true; curVec.push_back(i); } } } } //还需要判断这一层是否为空,为空则不必向下进行遍历 if(curVec.size() == 0){ return; } else{ breadthFirstTraverseImp(curVec); } } void CMap::primTree(int nodeIndex) {//Prim生成树 int value = 0; int edgeCount =0; vector<int> nodeVec;//存储点的集合 vector<Edge> edgeVec;//存储边的集合 //打印 cout << m_pNodeArray[nodeIndex].m_cData <<endl; nodeVec.push_back(nodeIndex); m_pNodeArray[nodeIndex].m_bIsVisited = true; // while (edgeCount < m_iCapacity - 1){ int temp = nodeVec.back(); //寻找与该结点连接的所有的边 for(int i = 0; i < m_iCapacity;i++){ getValueFromMatrix(temp,i,value); if(value != 0){ if(m_pNodeArray[i].m_bIsVisited) {//看点被访问过没,而不是边 continue; } else{ //若这条边还没有被访问过,放进数组 Edge edge(temp,i,value);//用构造函数实例化一个边的对象 edgeVec.push_back(edge); } } } //此时与temp连接的边都放入了备选边中,不会重复放入同一条边 //从可选边集合中找出最小的边,连着这条边的另一个顶点就放入点的集合中 //从可选边集合中找出最小的边函数: int edgeIndex = getMinEdge(edgeVec); edgeVec[edgeIndex].m_bSelected = true;//把选中的边置为true //打印一下这个边 cout << edgeVec[edgeIndex].m_iNodeIndexA << "----" << edgeVec[edgeIndex].m_iNodeIndexB; cout << " " << edgeVec[edgeIndex].m_iWeightValue << endl; //再把这条边放入最小生成树边的集合中 m_pEdge[edgeCount] = edgeVec[edgeIndex]; edgeCount++; //连着这条边的另一个顶点就放入点的集合中 int nextNodeIndex = edgeVec[edgeIndex].m_iNodeIndexB; nodeVec.push_back(nextNodeIndex);//放入点时需要将访问置为true m_pNodeArray[nextNodeIndex].m_bIsVisited = true; //打印下一个点 cout<<m_pNodeArray[nextNodeIndex].m_cData << endl; } } int CMap::getMinEdge(vector<Edge> edgeVec){ int minWeight = 0; int edgeIndex = 0; int i = 0; for(; i < edgeVec.size();i++){ if(!edgeVec[i].m_bSelected){//先看selected是不是为假 minWeight = edgeVec[i].m_iWeightValue; //还需要记录最小边的索引 edgeIndex = i; break;//找到第一个点之后就要跳出循环 } } if(minWeight == 0){//找最小边失败,返回-1 return -1; } for(;i < edgeVec.size();i++){ if(edgeVec[i].m_bSelected){//若为true continue; } else{ if(minWeight > edgeVec[i].m_iWeightValue){ minWeight = edgeVec[i].m_iWeightValue; edgeIndex = i; } } } return edgeIndex; }Node.h: #ifndef INC_0214_NODE_H #define INC_0214_NODE_H class Node{ public: Node(char data =0); char m_cData; bool m_bIsVisited;//访问过了是true }; #endif //INC_0214_NODE_HNode.cpp: #include "Node.h" Node::Node(char data) { m_cData = data; m_bIsVisited = false; }Edge.h: #ifndef INC_0214_EDGE_H #define INC_0214_EDGE_H class Edge{ public: Edge(int nodeIndexA = 0,int nodeIndexB = 0,int weightValue = 0); int m_iNodeIndexA; int m_iNodeIndexB; int m_iWeightValue; bool m_bSelected; }; #endif //INC_0214_EDGE_HEdge.cpp: #include "Edge.h" Edge::Edge(int nodeIndexA,int nodeIndexB,int weightValue){ m_iNodeIndexA = nodeIndexA; m_iNodeIndexB = nodeIndexB; m_iWeightValue = weightValue; m_bSelected = false;//false为未访问过 }- 2赞 · 0采集
-

- 慕粉3672057 2017-08-30
- break;
-
截图0赞 · 0采集
-
- 慕粉3672057 2017-08-30
- true
-
截图0赞 · 0采集
-

- 慕妹2098627 2017-08-25
- 对于有的编译器来说,在定义的时候存在默认值可能去出现编译错误
-
截图0赞 · 0采集
-

- 极速传说201466 2017-04-28
- 最小边函数 int CMap::getMinEdge(vector<Edge>edgeVec) { int minWeight=0; int edgeIndex=0; int i=0; for(int i=0;i<edgeVec.size();i++) { if(!edgeVec[i].m_bSelected) { minWeight=edgeVec[i].m_iWeightValue; edgeIndex=i; break; } } if(minWeight==0) return -1; for(;i<edgeVec.size();i++) { if(!edgeVec[i].m_bSelected&&!m_pNodeArray[edgeVec[i].m_iNodeIndexB].m_bIsVisited)//注意不要有环路,B点不能访问过 { if(minWeight>edgeVec[i].m_iWeightValue) { minWeight=edgeVec[i].m_iWeightValue; edgeIndex=i; } } } return edgeIndex; }
- 1赞 · 2采集
-
- 极速传说201466 2017-04-28
- Prime算法 void CMap::primTree(int nodeIndex) { int value=0; int edgeCount=0; vector<int>nodeVec; vector<Edge>edgeVec; cout<<m_pNodeArray[nodeIndex].m_cData<<endl; nodeVec.push_back(nodeIndex); m_pNodeArray[nodeIndex].m_bIsVisited=true;//“不要忘了” while(edgeCount<m_iCapacity-1) { int temp=nodeVec.back(); for(int i=0;i<m_iCapacity;i++) { getValueFromMatrix(temp,i,value); if(value!=0) { if(!m_pNodeArray[i].m_bIsVisited) { Edge edge(temp,i,value); edgeVec.push_back(edge); } } } int edgeIndex=getMinEdge(edgeVec); edgeVec[edgeIndex].m_bSelected=true; cout<<edgeVec[edgeIndex].m_iNodeIndexA<<"----"<<edgeVec[edgeIndex].m_iNodeIndexB<<" "; cout<<edgeVec[edgeIndex].m_iWeightValue<<endl; m_pEdge[edgeCount]=edgeVec[edgeIndex]; edgeCount++; int nextNodeIndex=edgeVec[edgeIndex].m_iNodeIndexB; nodeVec.push_back(nextNodeIndex); m_pNodeArray[nextNodeIndex].m_bIsVisited=true; cout<<m_pNodeArray[nextNodeIndex].m_cData<<endl; } }
- 1赞 · 2采集
-

- 精慕门4947531 2016-11-10
- 那个地方出错了,慢慢查 i 6 int nextNodeIndex 2 int edgeIndex 6 int temp 2 int + this 0x00395d40 {m_iCapacity=6 m_iNodeCount=6 m_pNodeArray=0x00395d90 ...} DMap * const nodeIndex 0 int + nodeVect [5](0,5,0,1,2) std::vector<int,std::allocator<int> > edgeCount 4 int + edgeVect [12]({m_iNodeIndexA=0 m_iNodeIndexB=1 m_iWeightValue=6 ...},{m_iNodeIndexA=0 m_iNodeIndexB=4 m_iWeightValue=5 ...},{m_iNodeIndexA=0 m_iNodeIndexB=5 m_iWeightValue=1 ...},{m_iNodeIndexA=5 m_iNodeIndexB=0 m_iWeightValue=1 ...},{m_iNodeIndexA=5 m_iNodeIndexB=1 m_iWeightValue=2 ...},{m_iNodeIndexA=5 m_iNodeIndexB=2 m_iWeightValue=8 ...},{m_iNodeIndexA=5 m_iNodeIndexB=3 m_iWeightValue=4 ...},{m_iNodeIndexA=5 m_iNodeIndexB=4 m_iWeightValue=9 ...},{m_iNodeIndexA=0 m_iNodeIndexB=1 m_iWeightValue=6 ...},{m_iNodeIndexA=0 m_iNodeIndexB=4 m_iWeightValue=5 ...},{m_iNodeIndexA=1 m_iNodeIndexB=2 m_iWeightValue=3 ...},{m_iNodeIndexA=2 m_iNodeIndexB=3 m_iWeightValue=7 ...}) std::vector<Edge,std::allocator<Edge> > value 8 int
- 0赞 · 0采集
-
- Swordsemperor 2016-10-13
- void Cmap::primTree(int index) { int edgeCount = 0; int val = 0; vector<int> nodeVec; vector<edge> edgeVec; nodeVec.push_back(index); nodeArray[index].visited = true; cout << nodeArray[index].Data << endl; while (edgeCount < campacity - 1) { int temp = nodeVec.back(); for (int i = 0; i < campacity; i++) { getValue(temp, i, val); if (val != 0) { if (nodeArray[i].visited) { continue; } else { //nodeVec.push_back(i); //nodeArray[i].visited = true; edge edgeTemp(temp, i, val); edgeVec.push_back(edgeTemp); } } } int edgeIndex = getMiniEdge(edgeVec); edgeVec[edgeIndex].visited=true; cout << edgeVec[edgeIndex].nodeA << "---" << edgeVec[edgeIndex].nodeB ; cout <<" "<< edgeVec[edgeIndex].value << endl; edgeArray[edgeCount++] = edgeVec[edgeIndex]; int nextNode = edgeVec[edgeIndex].nodeB; nodeVec.push_back(nextNode); nodeArray[nextNode].visited = true; cout << nodeArray[nextNode].Data << endl; } }
- 0赞 · 1采集





数据加载中...