
上一讲说到调度器将 main goroutine 推上舞台,为它铺好了道路,开始执行 runtime.main 函数。这一讲,我们探索 main goroutine 以及普通 goroutine 从执行到退出的整个过程。
// The main goroutine.func main() {// g = main goroutine,不再是 g0 了g := getg()// ……………………if sys.PtrSize == 8 {maxstacksize = 1000000000} else {maxstacksize = 250000000}// Allow newproc to start new Ms.mainStarted = truesystemstack(func() {// 创建监控线程,该线程独立于调度器,不需要跟 p 关联即可运行newm(sysmon, nil)})lockOSThread()if g.m != &m0 {throw("runtime.main not on m0")}// 调用 runtime 包的初始化函数,由编译器实现runtime_init() // must be before deferif nanotime() == 0 {throw("nanotime returning zero")}// Defer unlock so that runtime.Goexit during init does the unlock too.needUnlock := truedefer func() {if needUnlock {unlockOSThread()}}()// Record when the world started. Must be after runtime_init// because nanotime on some platforms depends on startNano.runtimeInitTime = nanotime()// 开启垃圾回收器gcenable()main_init_done = make(chan bool)// ……………………// main 包的初始化,递归的调用我们 import 进来的包的初始化函数fn := main_initfn()close(main_init_done)needUnlock = falseunlockOSThread()// ……………………// 调用 main.main 函数fn = main_mainfn()if raceenabled {racefini()}// ……………………// 进入系统调用,退出进程,可以看出 main goroutine 并未返回,而是直接进入系统调用退出进程了exit(0)// 保护性代码,如果 exit 意外返回,下面的代码会让该进程 crash 死掉for {var x *int32*x = 0}}
main 函数执行流程如下图:
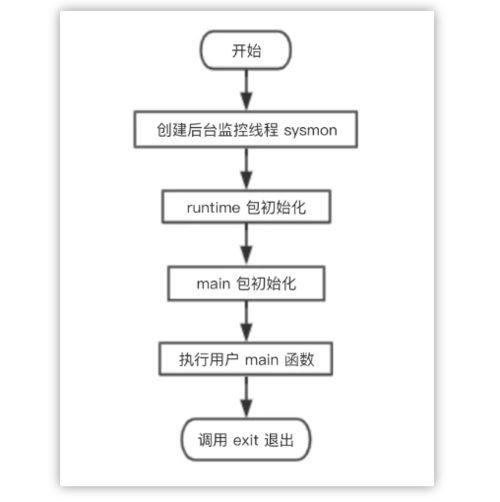
从流程图可知,main goroutine 执行完之后就直接调用 exit(0) 退出了,这会导致整个进程退出,太粗暴了。
不过,main goroutine 实际上就是代表用户的 main 函数,它都执行完了,肯定是用户的任务都执行完了,直接退出就可以了,就算有其他的 goroutine 没执行完,同样会直接退出。
package mainimport "fmt"func main() {go func() {fmt.Println("hello qcrao.com")}()}
在这个例子中,main gorutine 退出时,还来不及执行 go出去 的函数,整个进程就直接退出了,打印语句不会执行。因此,main goroutine 不会等待其他 goroutine 执行完再退出,知道这个有时能解释一些现象,比如上面那个例子。
这时,心中可能会跳出疑问,我们在新创建 goroutine 的时候,不是整出了个“偷天换日”,风风火火地设置了 goroutine 退出时应该跳到 runtime.goexit 函数吗,怎么这会不用了,闲得慌?
回顾一下上一讲的内容,跳转到 main 函数的两行代码:
// 把 sched.pc 值放入 BX 寄存器MOVQ gobuf_pc(BX), BX// JMP 把 BX 寄存器的包含的地址值放入 CPU 的 IP 寄存器,于是,CPU 跳转到该地址继续执行指令JMP BX
直接使用了一个跳转,并没有使用 CALL 指令,而 runtime.main 函数中确实也没有 RET 返回的指令。所以,main goroutine 执行完后,直接调用 exit(0) 退出整个进程。
那之前整地“偷天换日”还有用吗?有的!这是针对非 main goroutine 起作用。
参考资料【阿波张 非 goroutine 的退出】中用调试工具验证了非 main goroutine 的退出,感兴趣的可以去跟着实践一遍。
我们继续探索非 main goroutine (后文我们就称 gp 好了)的退出流程。
gp 执行完后,RET 指令弹出 goexit 函数地址(实际上是 funcPC(goexit)+1),CPU 跳转到 goexit 的第二条指令继续执行:
// src/runtime/asm_amd64.s// The top-most function running on a goroutine// returns to goexit+PCQuantum.TEXT runtime·goexit(SB),NOSPLIT,$0-0BYTE $0x90 // NOPCALL runtime·goexit1(SB) // does not return// traceback from goexit1 must hit code range of goexitBYTE $0x90 // NOP
直接调用 runtime·goexit1:
// src/runtime/proc.go// Finishes execution of the current goroutine.func goexit1() { // …………………… mcall(goexit0)}调用 mcall 函数:
// 切换到 g0 栈,执行 fn(g)// Fn 不能返回TEXT runtime·mcall(SB), NOSPLIT, $0-8// 取出参数的值放入 DI 寄存器,它是 funcval 对象的指针,此场景中 fn.fn 是 goexit0 的地址MOVQ fn+0(FP), DIget_tls(CX)// AX = gMOVQ g(CX), AX // save state in g->sched// mcall 返回地址放入 BXMOVQ 0(SP), BX // caller's PC// g.sched.pc = BX,保存 g 的 PCMOVQ BX, (g_sched+gobuf_pc)(AX)LEAQ fn+0(FP), BX // caller's SP// 保存 g 的 SPMOVQ BX, (g_sched+gobuf_sp)(AX)MOVQ AX, (g_sched+gobuf_g)(AX)MOVQ BP, (g_sched+gobuf_bp)(AX)// switch to m->g0 & its stack, call fnMOVQ g(CX), BXMOVQ g_m(BX), BX// SI = g0MOVQ m_g0(BX), SICMPQ SI, AX // if g == m->g0 call badmcallJNE 3(PC)MOVQ $runtime·badmcall(SB), AXJMP AX// 把 g0 的地址设置到线程本地存储中MOVQ SI, g(CX) // g = m->g0// 从 g 的栈切换到了 g0 的栈DMOVQ (g_sched+gobuf_sp)(SI), SP // sp = m->g0->sched.sp// AX = g,参数入栈PUSHQ AXMOVQ DI, DX// DI 是结构体 funcval 实例对象的指针,它的第一个成员才是 goexit0 的地址// 读取第一个成员到 DI 寄存器MOVQ 0(DI), DI// 调用 goexit0(g)CALL DIPOPQ AXMOVQ $runtime·badmcall2(SB), AXJMP AXRET
函数参数是:
type funcval struct { fn uintptr // variable-size, fn-specific data here}字段 fn 就表示 goexit0 函数的地址。
L5 将函数参数保存到 DI 寄存器,这里 fn.fn 就是 goexit0 的地址。
L7 将 tls 保存到 CX 寄存器,L9 将 当前线程指向的 goroutine (非 main goroutine,称为 gp)保存到 AX 寄存器,L11 将调用者(调用 mcall 函数)的栈顶,这里就是 mcall 完成后的返回地址,存入 BX 寄存器。
L13 将 mcall 的返回地址保存到 gp 的 g.sched.pc 字段,L14 将 gp 的栈顶,也就是 SP 保存到 BX 寄存器,L16 将 SP 保存到 gp 的 g.sched.sp 字段,L17 将 g 保存到 gp 的 g.sched.g 字段,L18 将 BP 保存 到 gp 的 g.sched.bp 字段。这一段主要是保存 gp 的调度信息。
L21 将当前指向的 g 保存到 BX 寄存器,L22 将 g.m 字段保存到 BX 寄存器,L23 将 g.m.g0 字段保存到 SI,g.m.g0 就是当前工作线程的 g0。
现在,SI = g0, AX = gp,L25 判断 gp 是否是 g0,如果 gp == g0 说明有问题,执行 runtime·badmcall。正常情况下,PC 值加 3,跳过下面的两条指令,直接到达 L30。
L30 将 g0 的地址设置到线程本地存储中,L32 将 g0.SP 设置到 CPU 的 SP 寄存器,这也就意味着我们从 gp 栈切换到了 g0 的栈,要变天了!
L34 将参数 gp 入栈,为调用 goexit0 构造参数。L35 将 DI 寄存器的内容设置到 DX 寄存器,DI 是结构体 funcval 实例对象的指针,它的第一个成员才是 goexit0 的地址。L36 读取 DI 第一成员,也就是 goexit0 函数的地址。
L40 调用 goexit0 函数,这已经是在 g0 栈上执行了,函数参数就是 gp。
到这里,就会去执行 goexit0 函数,注意,这里永远都不会返回。所以,在 CALL 指令后面,如果返回了,又会去调用 runtime.badmcall2 函数去处理意外情况。
来继续看 goexit0:
// goexit continuation on g0.// 在 g0 上执行func goexit0(gp *g) {// g0_g_ := getg()casgstatus(gp, _Grunning, _Gdead)if isSystemGoroutine(gp) {atomic.Xadd(&sched.ngsys, -1)}// 清空 gp 的一些字段gp.m = nilgp.lockedm = nil_g_.m.lockedg = nilgp.paniconfault = falsegp._defer = nil // should be true already but just in case.gp._panic = nil // non-nil for Goexit during panic. points at stack-allocated data.gp.writebuf = nilgp.waitreason = ""gp.param = nilgp.labels = nilgp.timer = nil// Note that gp's stack scan is now "valid" because it has no// stack.gp.gcscanvalid = true// 解除 g 与 m 的关系dropg()if _g_.m.locked&^_LockExternal != 0 {print("invalid m->locked = ", _g_.m.locked, "\n")throw("internal lockOSThread error")}_g_.m.locked = 0// 将 g 放入 free 队列缓存起来gfput(_g_.m.p.ptr(), gp)schedule()}
它主要完成最后的清理工作:
把 g 的状态从
_Grunning更新为_Gdead;清空 g 的一些字段;
调用 dropg 函数解除 g 和 m 之间的关系,其实就是设置 g->m = nil, m->currg = nil;
把 g 放入 p 的 freeg 队列缓存起来供下次创建 g 时快速获取而不用从内存分配。freeg 就是 g 的一个对象池;
调用 schedule 函数再次进行调度。
到这里,gp 就完成了它的历史使命,功成身退,进入了 goroutine 缓存池,待下次有任务再重新启用。
而工作线程,又继续调用 schedule 函数进行新一轮的调度,整个过程形成了一个循环。
总结一下,main goroutine 和普通 goroutine 的退出过程:
对于 main goroutine,在执行完用户定义的 main 函数的所有代码后,直接调用 exit(0) 退出整个进程,非常霸道。
对于普通 goroutine 则没这么“舒服”,需要经历一系列的过程。先是跳转到提前设置好的 goexit 函数的第二条指令,然后调用 runtime.goexit1,接着调用 mcall(goexit0),而 mcall 函数会切换到 g0 栈,运行 goexit0 函数,清理 goroutine 的一些字段,并将其添加到 goroutine 缓存池里,然后进入 schedule 调度循环。到这里,普通 goroutine 才算完成使命。
参考资料
【阿波张 非 main goroutine 的退出及调度循环】https://mp.weixin.qq.com/s/XttP9q7-PO7VXhskaBzGqA





