支持向量机(Support Vector Machine,简称 SVM)于 1995 年正式发表,由于其在文本分类任务中的卓越性能,很快就成为机器学习的主流技术。尽管现在 Deep Learning 很流行,SVM 仍然是一种很有的机器学习算法,在数据集小的情况下能比 Deep Learning 取得更好的结果。
本文将详细介绍线性 SVM,非线性 SVM 涉及到的 kernel,本文中没有介绍。我将从以下两个方面展开介绍线性 SVM:
间隔和支持向量
对偶问题
1. 间隔和支持向量
给定一个训练集D=(x1,y1),(x2,y2),...,(xm,ym),y∈{−1,+1}D=(x1,y1),(x2,y2),...,(xm,ym),y∈{−1,+1},我们想要找一个超平面对其进行划分,可以有多种选择,如下图所示:
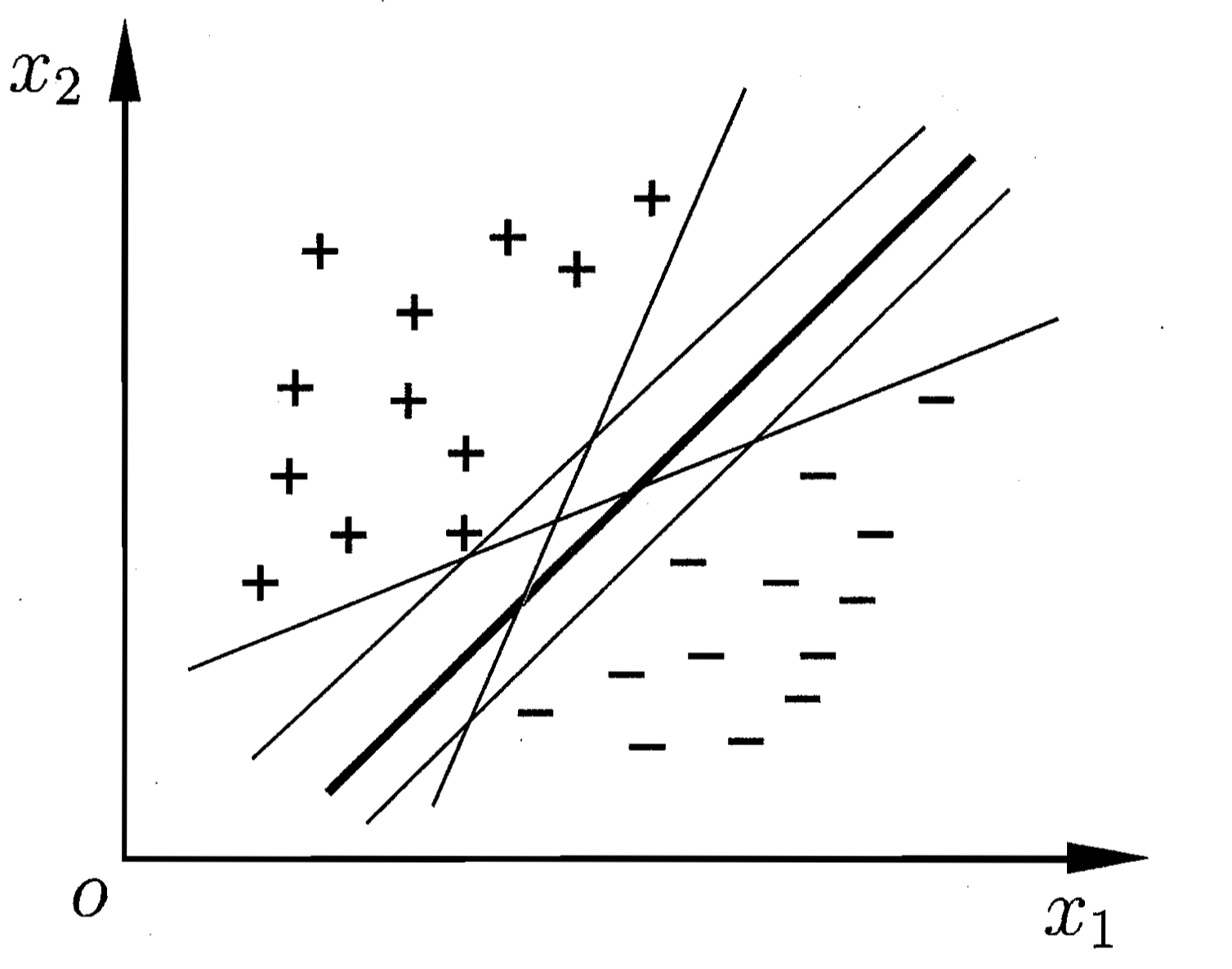
图 1 存在多个超平面可以将训练集划分开
凭直觉,我们会选择最中间的那个超平面(也就是图 1 中最粗的那条,注:在 2 维情况下,超平面就是一条直线),为什么?因为更 robust,测试集中的点一般没有在训练集中出现过,这个时候难免会有些点会偏向分类的超平面,要是该分类超平面离训练数据点近了,这些偏向超平面的数据点岂不是直接分错了。这个时候最中间的那条线受到的影响最小,所以最优。
在样本空间中,划分超平面可以通过以下线性方程来描述:
wTx+b=0(1)(1)wTx+b=0
其中w=[w1;w2;...;wd]w=[w1;w2;...;wd](注:ww是列向量)为法向量,决定了超平面的方向;bb是位移,决定了超平面和原定之间的距离。知道ww和bb,我们也就能确定该超平面的位置。样本空间中任一点xx到超平面wTx+b=0wTx+b=0的距离可以记为:
r=|wTx+b|∥w∥(2)(2)r=|wTx+b|‖w‖
假设超平面wTx+b=0wTx+b=0能够将训练集DD完全正确分类,即对于DD中任一样本(xi,yi)(xi,yi),若yi=+1yi=+1,则wTxi+b>0wTxi+b>0;若yi=−1yi=−1,则wTxi+b<0wTxi+b<0。我们再假设训练集DD的两个类别中,离超平面最近的点到超平面的距离都是r∗(r∗>0)r∗(r∗>0)(两个类别离超平面最近的点到超平面的距离是一样的,不然超平面就不在“最中间”,该超平面肯定不是最优的,可以对其平移满足这个条件)。此时所有训练集DD中点都满足以下方程:
{wTxi+b≥+r∗,wTxi+b≤−r∗,yi=+1yi=−1(3)(3){wTxi+b≥+r∗,yi=+1wTxi+b≤−r∗,yi=−1
此时我们对公式(3)做一个变换,不等式两边都除以r∗r∗可以得到:
{wTr∗xi+br∗≥+1,wTr∗xi+br∗≤−1,yi=+1yi=−1(4)(4){wTr∗xi+br∗≥+1,yi=+1wTr∗xi+br∗≤−1,yi=−1
对于公式(4)中的wTr∗wTr∗和br∗br∗,我们令其分别为新的wTwT和bb,这样做只是对原超平面wTx+b=0wTx+b=0的法向量和位移项进行了缩放,实际上并没有改变超平面的位置。(对位移项和法向量同时进行缩放,不会改变原点到超平面的距离,可以代入公式(2)进行检验。同样地,该变换也不会改变样本点和分类超平面之间的距离。)故而,公式(4)可以写成如下最常见的形式:
{wTxi+b≥+1,wTxi+b≤−1,yi=+1yi=−1(5)(5){wTxi+b≥+1,yi=+1wTxi+b≤−1,yi=−1
如图 2 所示,距离超平面最近的这几个训练样本点使式(5)的等号成立,它们被称为“支持向量”(support vector),两个类别的支持向量到超平面的距离之和为:
γ=2∥w∥(6)(6)γ=2‖w‖
其中,γγ被称为“间隔”(margin)。
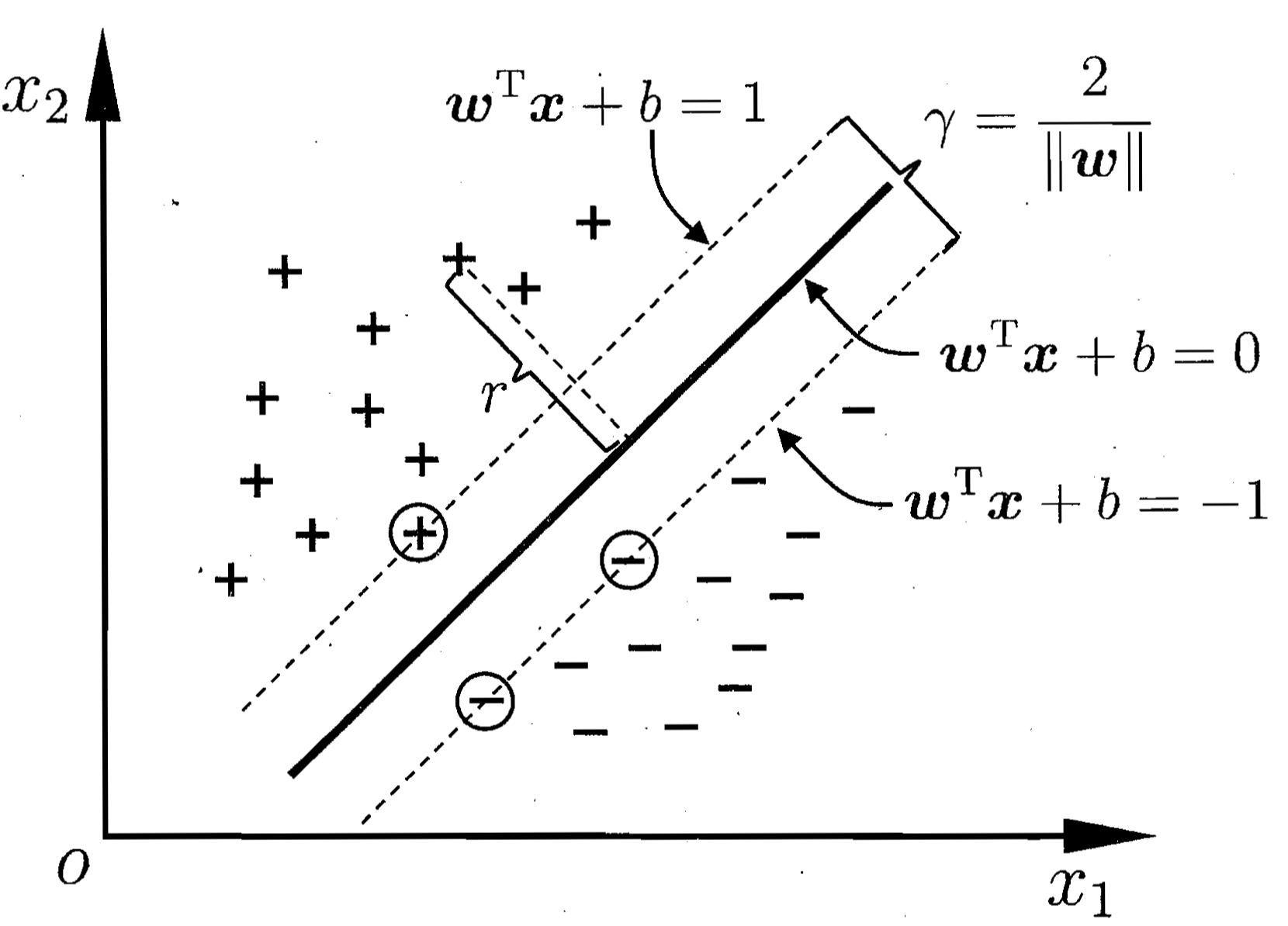
图 2 支持向量和间隔
式(5)中两个不等式可以合成一个统一的形式,如下所示:(这也是为什么类别yiyi的取值为 -1 和 1 的原因,方便将两个不等式统一形式)
yi(wTxi+b)≥1,i=1,2,...m.yi(wTxi+b)≥1,i=1,2,...m.
欲找到具有“最大间隔”(maximum margin)的划分超平面,也就是要找到能满足式(5)中约束的参数wTwT和bb,使得γγ最大,即
maxw,b2∥w∥ s.t.yi(wTxi+b)≥1,i=1,2,...m.(7)(7)maxw,b2‖w‖ s.t.yi(wTxi+b)≥1,i=1,2,...m.
为了最大化间隔,只需要式(7)中分母最小即可,即最小化∥w∥‖w‖,等价于最小化∥w∥2‖w‖2,式(7)可重新写为:
minw,b12∥w∥2 s.t.yi(wTxi+b)≥1,i=1,2,...m.(8)(8)minw,b12‖w‖2 s.t.yi(wTxi+b)≥1,i=1,2,...m.
式(8)就是支持向量机想要优化的目标函数。
2. 对偶问题
我们希望求解式(8)来得到最大间隔划分超平面所对应的模型:
f(x)=wTx+b(9)(9)f(x)=wTx+b
其中wTwT和bb是模型参数,式(8)本身是一个凸二次规划(convex quadratic programming)问题,能直接用现成的优化计算包求解,但我们可以有更高效的办法,即使用拉格朗日乘子法求其“对偶问题”(dual problem)。下面我们先来了解最优化问题可以分为哪几类,什么是拉格朗日乘子法,什么又是对偶问题。
2.1 最优化问题分类
通常,我们需要求解的最优化问题有如下几类:(注:2.1 小节的f(x)f(x)和公式(9)没有关系)
(i)无约束优化问题:
minxf(x)minxf(x)
(ii)有等式约束的优化问题:
s.t.minxf(x)hi(x)=0,i=1,2,…,n.minxf(x)s.t.hi(x)=0,i=1,2,…,n.
(iii)有不等于约束的优化问题:
s.t.minxf(x)hi(x)=0,i=1,2,…,n;gj(x)≤0,j=1,2,…,m.minxf(x)s.t.hi(x)=0,i=1,2,…,n;gj(x)≤0,j=1,2,…,m.
对于第(i)类的优化问题,尝试使用的方法就是费马大定理(Fermat),即使用求取函数f(x)f(x)的导数,然后令其为零,可以求得候选最优值,再在这些候选值中验证;如果是凸函数,可以保证是最优解。这也就是我们高中经常使用的求函数的极值的方法。
对于第(ii)类的优化问题,常常使用的方法就是拉格朗日乘子法(Lagrange Multiplier) ,即把等式约束hi(x)=0hi(x)=0用一个系数与f(x)f(x)写为一个式子,称为拉格朗日函数,而系数称为拉格朗日乘子。通过拉格朗日函数对各个变量求导,令其为零,可以求得候选值集合,然后验证求得最优值。
对于第(iii)类的优化问题,常常使用的方法就是KKT条件。同样地,我们把所有的等式、不等式约束与f(x)f(x)写为一个式子,也叫拉格朗日函数,系数也称拉格朗日乘子,通过一些条件,可以求出最优值的必要条件,这个条件称为KKT条件。(注:若事件 B 是事件 A 的必要条件,则从事件 A 可以推出事件 B)
SVM 的优化问题属于第(iii)类。
2.2 拉格朗日乘子法
拉格朗日乘子法(Lagrange multipliers)是一种寻找多元函数在一组约束下的极值的方法。通过引入拉格朗日乘子,可以将有dd个变量和kk个约束条件的最优化问题转化为具有d+kd+k个变量的无约束优化问题求解。
为什么需要拉格朗日乘子法?当然是因为无约束的问题比有约束的问题更好求解。
“我们知道我们要求解的是最小化问题,所以一个直观的想法是如果我能够构造一个函数,使得该函数在可行解区域内与原目标函数完全一致,而在可行解区域外的数值非常大,甚至是无穷大,那么这个没有约束条件的新目标函数的优化问题就与原来有约束条件的原始目标函数的优化问题是等价的问题。这就是使用拉格朗日方程的目的,它将约束条件放到目标函数中,从而将有约束优化问题转换为无约束优化问题。”
随后,人们又发现,使用拉格朗日获得的函数,使用求导的方法求解依然困难。进而,需要对问题再进行一次转换,即使用一个数学技巧:拉格朗日对偶。
所以,显而易见的是,我们在拉格朗日优化我们的问题这个道路上,需要进行下面二个步骤:
将有约束的原始目标函数转换为无约束的新构造的拉格朗日目标函数
使用拉格朗日对偶性,将不易求解的优化问题转化为易求解的优化
下面首先将有约束的 SVM 目标函数式(8)转化为无约束的拉格朗日函数:
式(8)中只有不等式约束gi(w,b)≤0gi(w,b)≤0(即1−yi(wTxi+b)≤0,i=1,2,...m.1−yi(wTxi+b)≤0,i=1,2,...m.),所以这里不考虑等式约束的情况。式(8)转化的无约束的拉格朗日函数如下所示:
L(w,b,α)=12∥w∥2+∑i=1mαi(1−yi(wTxi+b))(10)(10)L(w,b,α)=12‖w‖2+∑i=1mαi(1−yi(wTxi+b))
其中α=[α1,α2,...,αm]Tα=[α1,α2,...,αm]T为拉格朗日乘子,且αi≥0,i=1,2,...,mαi≥0,i=1,2,...,m。然后,我们令
θ(w)=maxαi≥0L(w,b,α)(11)(11)θ(w)=maxαi≥0L(w,b,α)
当样本点不满足约束条件时,即在可行解区域外:
yi(wTxi+b)<1(12)(12)yi(wTxi+b)<1
此时我们将αiαi设置为正无穷,此时θ(w)θ(w)显然也是正无穷。
当样本点满足约束条件时,即在可行解区域内:
yi(wTxi+b)≥1(13)(13)yi(wTxi+b)≥1
此时,αi(1−yi(wTxi+b))≤0αi(1−yi(wTxi+b))≤0,想要最大化θ(w)θ(w),这一项为 0 即可,即此时θ(w)=12∥w∥2θ(w)=12‖w‖2。所以θ(w)θ(w)可以写成如下形式:
θ(w)={12∥w∥2,+∞,xi∈可行域;xi∈不可行域,i=1,2,...m.(14)(14)θ(w)={12‖w‖2,xi∈可行域;+∞,xi∈不可行域,i=1,2,...m.
自此,我们建立了一个在可行域内和原目标函数相同,在可行域外函数值趋近无穷大的新函数。
现在我们的问题变成了求新函数的最小值:
minw,bθ(w)=minw,bmaxαi≥0L(w,b,α)=p∗(15)(15)minw,bθ(w)=minw,bmaxαi≥0L(w,b,α)=p∗
这里的p∗p∗表示这个问题的最优值,和原目标函数的最优值是一样的。
2.3 拉格朗日对偶
在式(15)中,我们先求最大值,再求最小值,在求最大值面临的是含有未知参数w,bw,b的,而且αi≥0αi≥0又是不等式约束,如果此时我们要对αiαi求偏导,那么有多少个样本就要求多少个偏导,这个求解过程不好做。所以,我们需要使用拉格朗日函数对偶性,将最小和最大的位置交换一下,这样就变成了:
maxαi≥0minw,bL(w,b,α)=d∗(16)(16)maxαi≥0minw,bL(w,b,α)=d∗
式(16)是式(15)的对偶问题,这个新问题的最优值用d∗d∗表示。显然有d∗≤p∗d∗≤p∗,这称为“弱对偶性”成立;若d∗=p∗d∗=p∗,则称为“强对偶性”成立,此时由对偶问题能获得主问题的最优下界。对于一般的优化问题,强对偶性通常不成立。但是若主问题是凸优化问题,如式(8)中12∥w∥212‖w‖2和1−yi(wTxi+b)1−yi(wTxi+b)均为凸函数,且其可行域中至少有一个点使不等式约束严格成立(即至少存在一个w,bw,b,使得1−yi(wTxi+b)<01−yi(wTxi+b)<0成立),则此时强对偶性成立。
令L(w,b,α)L(w,b,α)对ww和bb分别求偏导可得:
w=∑i=1mαiyixi(17)(17)w=∑i=1mαiyixi
0=∑i=1mαiyi(18)(18)0=∑i=1mαiyi
将公式(17)代入公式(10),即可将L(w,b,α)L(w,b,α)中的ww和bb消去,再考虑式(18)的约束,就得到式(8)的拉格朗日对偶问题:
maxαs.t.∑i=1mαi−12∑i=1m∑j=1mαiαjyiyjxTixj∑i=1mαiyi=0,αi≥0,i=1,2,…,m.(19)(19)maxα∑i=1mαi−12∑i=1m∑j=1mαiαjyiyjxiTxjs.t.∑i=1mαiyi=0,αi≥0,i=1,2,…,m.
现在我们的优化问题如公式(19)所示,我们只需要求出αiαi,然后将其代入公式(17)求出ww,然后找个支持向量带入公式(9)算出bb。(支持向量代入公式(9)会得到f(x)=±1f(x)=±1,此时随便一个支持向量x∗x∗都能解出b=f(x∗)−wTx∗=±1−wTx∗b=f(x∗)−wTx∗=±1−wTx∗。)而求解αiαi,一般会用 SMO 算法。(这里不再展开)
最后得到的 SVM 判别函数为:
f(x)=wTx+b=∑i=1mαiyixTixi+b(20)(20)f(x)=wTx+b=∑i=1mαiyixiTxi+b
这就结束了吗?还没有,注意到公式(8)中有不等式约束,因此上述过程需满足 KKT(Karush-Kuhn-Tucker)条件,即要求
αi≥0;1−yi(wTxi+b)≤0;αi(1−yi(wTxi+b)=0.(21)(21){αi≥0;1−yi(wTxi+b)≤0;αi(1−yi(wTxi+b)=0.
具体 KKT 条件的由来这里不做论述,但需要明白,如果目标函数求得了最优解,则 KKT 条件一定会满足,即 KKT 条件是最优解的必要条件。
于是,对于任意的训练样本(xi,bi)(xi,bi),总有αi=0αi=0或者yi(wTxi+b)=1yi(wTxi+b)=1。若αi=0αi=0,则该样本将不会出现在式(20)的求和中出现,也就不会对f(x)f(x)有任何影响;若αi>0αi>0,则必有yi(wTxi+b)=1yi(wTxi+b)=1,所对应的样本点在位于最大间隔边界上,是一个支持向量。这里显示出 SVM 的一个重要性质:训练完成后,大部分的训练样本都不需要保留,最终模型仅与支持向量有关。
References
《机器学习》周志华
机器学习实战教程(八):支持向量机原理篇之手撕线性SVM -- Jack Cui
深入理解拉格朗日乘子法(Lagrange Multiplier) 和KKT条件 -- xianlingmao
支持向量机(SVM)必备知识(KKT、slater、对偶)-- feilong_csdn