
Binder承担了绝大部分Android进程通信的职责,可以看做是Android的血管系统,负责不同服务模块进程间的通信。在对Binder的理解上,可大可小,日常APP开发并不怎么涉及Binder通信知识,最多就是Service及AIDL的使用会涉及部分Binder知识。Binder往小了说可总结成一句话:一种IPC进程间通信方式,负责进程A的数据,发送到进程B。往大了说,其实涉及的知识还是很多的,如Android 对于原Binder驱动的扩展、Zygote进程孵化中对于Binder通信的支持、Java层Binder封装,Native层对于Binder通信的封装、Binder讣告机制等等。很多分析Binder框架的文都是从ServiceManager、Binder驱动、addService、getService来分析等来分析,其实这些主要是针对系统提供的服务,但是bindService启动的服务走的却还是有很大不同的。本篇文章主要简述一些Binder难以理解的点,但不会太细的跟踪分析,只抛砖,自己去发掘玉。
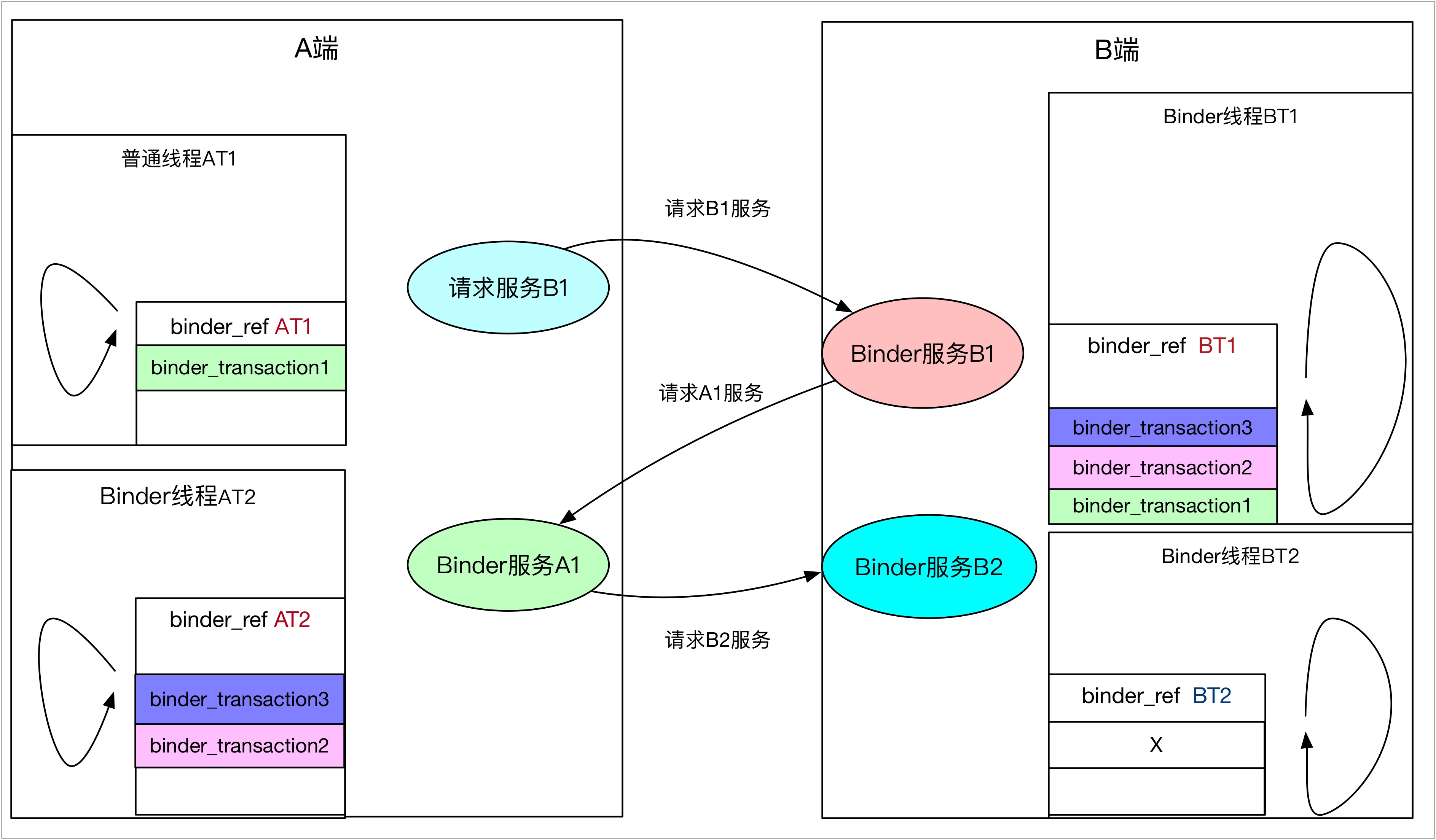
Binder的定向制导,如何找到目标Binder,唤起进程或者线程
Binder中的红黑树,为什么会有两棵binder_ref红黑树
Binder一次拷贝原理(直接拷贝到目标线程的内核空间,内核空间与用户空间对应)
Binder传输数据的大小限制(内核4M 上层限制1m-8k),传输Bitmap过大,就会崩溃的原因,Activity之间传输BitMap
系统服务与bindService等启动的服务的区别
Binder线程、Binder主线程、Client请求线程的概念与区别
Client是同步而Server是异步到底说的什么
Android APP进程天生支持Binder通信的原理是什么
Android APP有多少Binder线程,是固定的么
Binder线程的睡眠与唤醒(请求线程睡在哪个等待队列上,唤醒目标端哪个队列上的线程)
Binder协议中BC与BR的区别
Binder在传输数据的时候是如何层层封装的--不同层次使用的数据结构(命令的封装)
Binder驱动传递数据的释放(释放时机)
一个简单的Binder通信C/S模型
ServiceManager addService的限制(并非服务都能使用ServiceManager的addService)
bindService启动Service与Binder服务实体的流程
Java层Binder实体与与BinderProxy是如何实例化及使用的,与Native层的关系是怎样的
Parcel readStrongBinder与writeStrongBinder的原理
Binder如何精确制导,找到目标Binder实体,并唤醒进程或者线程
Binder实体服务其实有两种,一是通过addService注册到ServiceManager中的服务,比如ActivityManagerService、PackageManagerService、PowerManagerService等,一般都是系统服务;还有一种是通过bindService拉起的一些服务,一般是开发者自己实现的服务。这里先看通过addService添加的被ServiceManager所管理的服务。有很多分析ServiceManager的文章,本文不分析ServiceManager,只是简单提一下,ServiceManager是比较特殊的服务,所有应用都能直接使用,因为ServiceManager对于Client端来说Handle句柄是固定的,都是0,所以ServiceManager服务并不需要查询,可以直接使用。
理解Binder定向制导的关键是理解Binder的四棵红黑树,先看一下binder_proc结构体,在它内部有四棵红黑树,threads,nodes,refs_by_desc,refs_by_node,nodes就是Binder实体在内核中对应的数据结构,binder_node里记录进程相关的binder_proc,还有Binder实体自身的地址等信息,nodes红黑树位于binder_proc,可以知道Binder实体其实是进程内可见,而不是线程内。
struct binder_proc {
struct hlist_node proc_node;
struct rb_root threads;
struct rb_root nodes;
struct rb_root refs_by_desc;
struct rb_root refs_by_node;
。。。 struct list_head todo;
wait_queue_head_t wait;
。。。
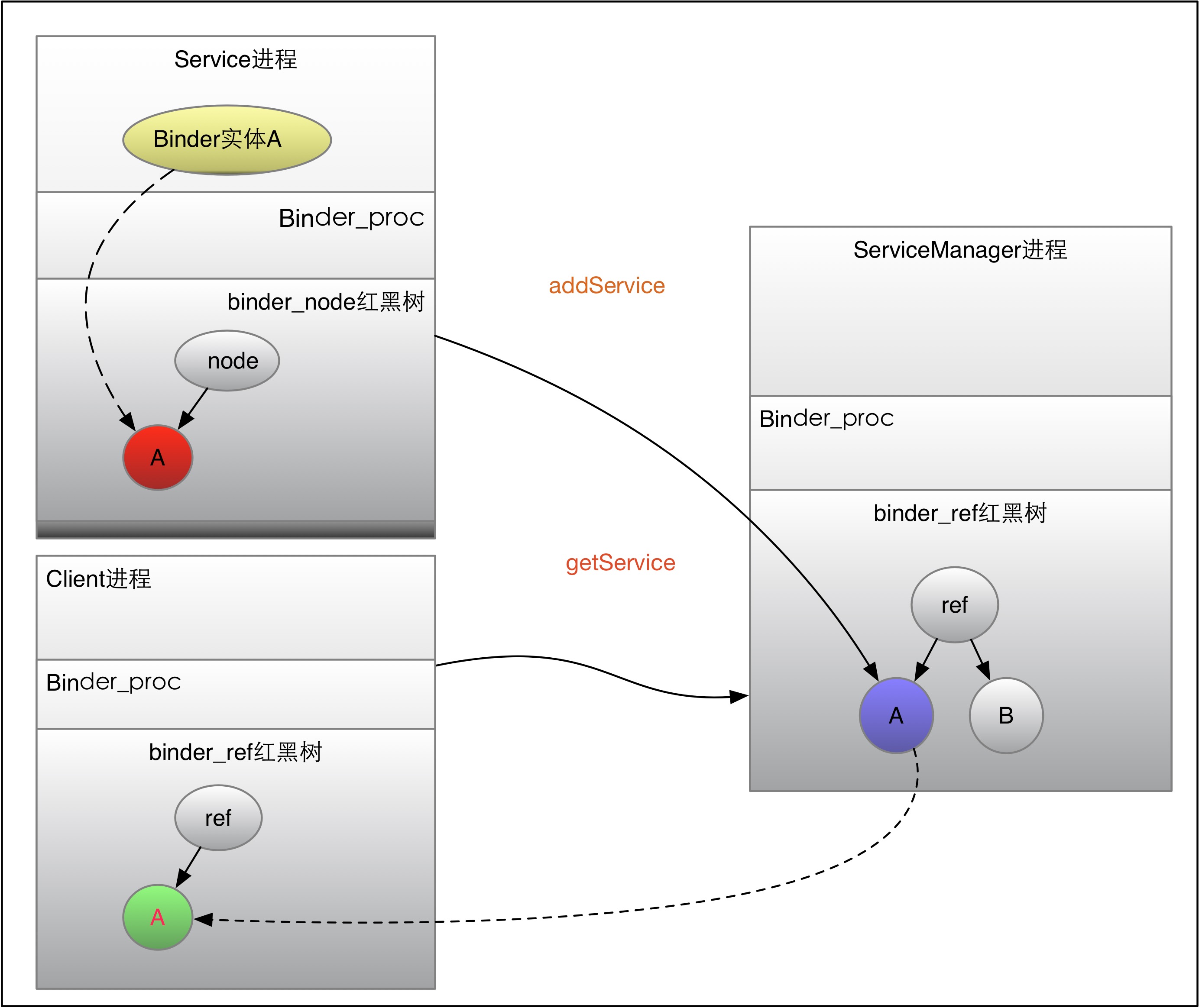
};现在假设存在一堆Client与Service,Client如何才能访问Service呢?首先Service会通过addService将binder实体注册到ServiceManager中去,Client如果想要使用Servcie,就需要通过getService向ServiceManager请求该服务。在Service通过addService向ServiceManager注册的时候,ServiceManager会将服务相关的信息存储到自己进程的Service列表中去,同时在ServiceManager进程的binder_ref红黑树中为Service添加binder_ref节点,这样ServiceManager就能获取Service的Binder实体信息。而当Client通过getService向ServiceManager请求该Service服务的时候,ServiceManager会在注册的Service列表中查找该服务,如果找到就将该服务返回给Client,在这个过程中,ServiceManager会在Client进程的binder_ref红黑树中添加binder_ref节点,可见本进程中的binder_ref红黑树节点都不是本进程自己创建的,要么是Service进程将binder_ref插入到ServiceManager中去,要么是ServiceManager进程将binder_ref插入到Client中去。之后,Client就能通过Handle句柄获取binder_ref,进而访问Service服务。
getService之后,便可以获取binder_ref引用,进而获取到binder_proc与binder_node信息,之后Client便可有目的的将binder_transaction事务插入到binder_proc的待处理列表,并且,如果进程正在睡眠,就唤起进程,其实这里到底是唤起进程还是线程也有讲究,对于Client向Service发送请求的状况,一般都是唤醒binder_proc上睡眠的线程:
struct binder_ref {
int debug_id; struct rb_node rb_node_desc;
struct rb_node rb_node_node;
struct hlist_node node_entry;
struct binder_proc *proc;
struct binder_node *node;
uint32_t desc; int strong; int weak; struct binder_ref_death *death;};binder_proc为何会有两棵binder_ref红黑树
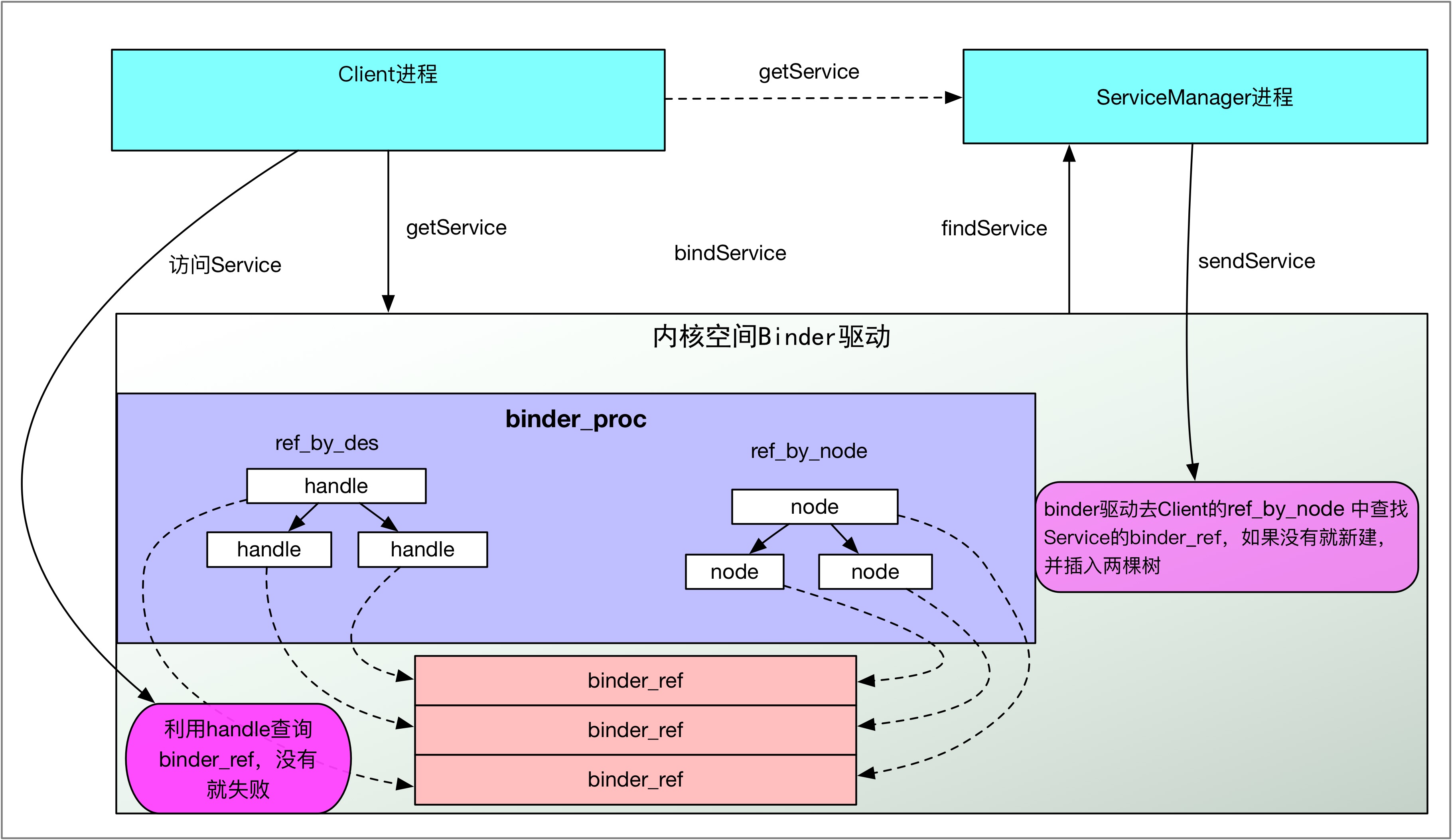
binder_proc中存在两棵binder_ref红黑树,其实两棵红黑树中的节点是复用的,只是查询方式不同,一个通过handle句柄,一个通过node节点查找。个人理解:refs_by_node红黑树主要是为了
binder驱动往用户空间写数据所使用的,而refs_by_desc是用户空间向Binder驱动写数据使用的,只是方向问题。比如在服务addService的时候,binder驱动会在在ServiceManager进程的binder_proc中查找binder_ref结构体,如果没有就会新建binder_ref结构体,再比如在Client端getService的时候,binder驱动会在Client进程中通过 binder_get_ref_for_node为Client创建binder_ref结构体,并分配句柄,同时插入到refs_by_desc红黑树中,可见refs_by_node红黑树,主要是给binder驱动往用户空间写数据使用的。相对的refs_by_desc主要是为了用户空间往binder驱动写数据使用的,当用户空间已经获得Binder驱动为其创建的binder_ref引用句柄后,就可以通过binder_get_ref从refs_by_desc找到响应binder_ref,进而找到目标binder_node。可见有两棵红黑树主要是区分使用对象及数据流动方向,看下面的代码就能理解:
// 根据32位的uint32_t desc来查找,可以看到,binder_get_ref不会新建binder_ref节点static struct binder_ref *binder_get_ref(struct binder_proc *proc, uint32_t desc){ struct rb_node *n = proc->refs_by_desc.rb_node;
struct binder_ref *ref;
while (n) {
ref = rb_entry(n, struct binder_ref, rb_node_desc); if (desc < ref->desc)
n = n->rb_left; else if (desc > ref->desc)
n = n->rb_right; else
return ref;
} return NULL;
}可以看到binder_get_ref并具备binder_ref的创建功能,相对应的看一下binder_get_ref_for_node,binder_get_ref_for_node红黑树主要通过binder_node进行查找,如果找不到,就新建binder_ref,同时插入到两棵红黑树中去
static struct binder_ref *binder_get_ref_for_node(struct binder_proc *proc,
struct binder_node *node)
{
struct rb_node *n;
struct rb_node **p = &proc->refs_by_node.rb_node;
struct rb_node *parent = NULL;
struct binder_ref *ref, *new_ref; while (*p) { parent = *p;
ref = rb_entry(parent, struct binder_ref, rb_node_node); if (node < ref->node)
p = &(*p)->rb_left; else if (node > ref->node)
p = &(*p)->rb_right; else
return ref;
} // binder_ref 可以在两棵树里面,但是,两棵树的查询方式不同,并且通过desc查询,不具备新建功能
new_ref = kzalloc(sizeof(*ref), GFP_KERNEL); if (new_ref == NULL) return NULL;
binder_stats_created(BINDER_STAT_REF);
new_ref->debug_id = ++binder_last_id;
new_ref->proc = proc;
new_ref->node = node;
rb_link_node(&new_ref->rb_node_node, parent, p); // 插入到proc->refs_by_node红黑树中去
rb_insert_color(&new_ref->rb_node_node, &proc->refs_by_node); // 是不是ServiceManager的
new_ref->desc = (node == binder_context_mgr_node) ? 0 : 1; // 分配Handle句柄,为了插入到refs_by_desc
for (n = rb_first(&proc->refs_by_desc); n != NULL; n = rb_next(n)) {
ref = rb_entry(n, struct binder_ref, rb_node_desc); if (ref->desc > new_ref->desc) break;
new_ref->desc = ref->desc + 1;
} // 找到目标位置
p = &proc->refs_by_desc.rb_node; while (*p) { parent = *p;
ref = rb_entry(parent, struct binder_ref, rb_node_desc); if (new_ref->desc < ref->desc)
p = &(*p)->rb_left; else if (new_ref->desc > ref->desc)
p = &(*p)->rb_right; else
BUG();
}
rb_link_node(&new_ref->rb_node_desc, parent, p); // 插入到refs_by_desc红黑树中区
rb_insert_color(&new_ref->rb_node_desc, &proc->refs_by_desc); if (node) {
hlist_add_head(&new_ref->node_entry, &node->refs);
binder_debug(BINDER_DEBUG_INTERNAL_REFS, "binder: %d new ref %d desc %d for "
"node %d\n", proc->pid, new_ref->debug_id,
new_ref->desc, node->debug_id);
} else {
binder_debug(BINDER_DEBUG_INTERNAL_REFS, "binder: %d new ref %d desc %d for "
"dead node\n", proc->pid, new_ref->debug_id,
new_ref->desc);
} return new_ref;
}该函数调用在binder_transaction函数中,其实就是在binder驱动访问target_proc的时候,这也也很容易理解,Handle句柄对于跨进程没有任何意义,进程A中的Handle,放到进程B中是无效的。
Binder一次拷贝原理
Android选择Binder作为主要进程通信的方式同其性能高也有关系,Binder只需要一次拷贝就能将A进程用户空间的数据为B进程所用。这里主要涉及两个点:
Binder的map函数,会将内核空间直接与用户空间对应,用户空间可以直接访问内核空间的数据
A进程的数据会被直接拷贝到B进程的内核空间(一次拷贝)
#define BINDER_VM_SIZE ((1*1024*1024) - (4096 *2))
ProcessState::ProcessState()
: mDriverFD(open_driver())
, mVMStart(MAP_FAILED)
, mManagesContexts(false)
, mBinderContextCheckFunc(NULL)
, mBinderContextUserData(NULL)
, mThreadPoolStarted(false)
, mThreadPoolSeq(1){ if (mDriverFD >= 0) {
.... // mmap the binder, providing a chunk of virtual address space to receive transactions.
mVMStart = mmap(0, BINDER_VM_SIZE, PROT_READ, MAP_PRIVATE | MAP_NORESERVE, mDriverFD, 0);
...
}
}mmap函数属于系统调用,mmap会从当前进程中获取用户态可用的虚拟地址空间(vm_area_struct *vma),并在mmap_region中真正获取vma,然后调用file->f_op->mmap(file, vma),进入驱动处理,之后就会在内存中分配一块连续的虚拟地址空间,并预先分配好页表、已使用的与未使用的标识、初始地址、与用户空间的偏移等等,通过这一步之后,就能把Binder在内核空间的数据直接通过指针地址映射到用户空间,供进程在用户空间使用,这是一次拷贝的基础,一次拷贝在内核中的标识如下:
struct binder_proc {
struct hlist_node proc_node;
// 四棵比较重要的树
struct rb_root threads;
struct rb_root nodes;
struct rb_root refs_by_desc;
struct rb_root refs_by_node;
int pid; struct vm_area_struct *vma; //虚拟地址空间,用户控件传过来
struct mm_struct *vma_vm_mm;
struct task_struct *tsk;
struct files_struct *files;
struct hlist_node deferred_work_node;
int deferred_work; void *buffer; //初始地址
ptrdiff_t user_buffer_offset; //这里是偏移
struct list_head buffers;//这个列表连接所有的内存块,以地址的大小为顺序,各内存块首尾相连
struct rb_root free_buffers;//连接所有的已建立映射的虚拟内存块,以内存的大小为index组织在以该节点为根的红黑树下
struct rb_root allocated_buffers;//连接所有已经分配的虚拟内存块,以内存块的开始地址为index组织在以该节点为根的红黑树下
}上面只是在APP启动的时候开启的地址映射,但并未涉及到数据的拷贝,下面看数据的拷贝操作。当数据从用户空间拷贝到内核空间的时候,是直从当前进程的用户空间接拷贝到目标进程的内核空间,这个过程是在请求端线程中处理的,操作对象是目标进程的内核空间。看如下代码:
static void binder_transaction(struct binder_proc *proc,
struct binder_thread *thread,
struct binder_transaction_data *tr, int reply){
...
在通过进行binder事物的传递时,如果一个binder事物(用struct binder_transaction结构体表示)需要使用到内存,
就会调用binder_alloc_buf函数分配此次binder事物需要的内存空间。
需要注意的是:这里是从目标进程的binder内存空间分配所需的内存 //从target进程的binder内存空间分配所需的内存大小,这也是一次拷贝,完成通信的关键,直接拷贝到目标进程的内核空间
//由于用户空间跟内核空间仅仅存在一个偏移地址,所以也算拷贝到用户空间
t->buffer = binder_alloc_buf(target_proc, tr->data_size,
tr->offsets_size, !reply && (t->flags & TF_ONE_WAY));
t->buffer->allow_user_free = 0;
t->buffer->debug_id = t->debug_id; //该binder_buffer对应的事务
t->buffer->transaction = t; //该事物对应的目标binder实体 ,因为目标进程中可能不仅仅有一个Binder实体
t->buffer->target_node = target_node;
trace_binder_transaction_alloc_buf(t->buffer); if (target_node)
binder_inc_node(target_node, 1, 0, NULL); // 计算出存放flat_binder_object结构体偏移数组的起始地址,4字节对齐。
offp = (size_t *)(t->buffer->data + ALIGN(tr->data_size, sizeof(void *))); // struct flat_binder_object是binder在进程之间传输的表示方式 //
// 这里就是完成binder通讯单边时候在用户进程同内核buffer之间的一次拷贝动作 //
// 这里的数据拷贝,其实是拷贝到目标进程中去,因为t本身就是在目标进程的内核空间中分配的,
if (copy_from_user(t->buffer->data, tr->data.ptr.buffer, tr->data_size)) {
binder_user_error("binder: %d:%d got transaction with invalid "
"data ptr\n", proc->pid, thread->pid);
return_error = BR_FAILED_REPLY; goto err_copy_data_failed;
}可以看到binder_alloc_buf(target_proc, tr->data_size,tr->offsets_size, !reply && (t->flags & TF_ONE_WAY))函数在申请内存的时候,是从target_proc进程空间中去申请的,这样在做数据拷贝的时候copy_from_user(t->buffer->data, tr->data.ptr.buffer, tr->data_size)),就会直接拷贝target_proc的内核空间,而由于Binder内核空间的数据能直接映射到用户空间,这里就不在需要拷贝到用户空间。这就是一次拷贝的原理。内核空间的数据映射到用户空间其实就是添加一个偏移地址,并且将数据的首地址、数据的大小都复制到一个用户空间的Parcel结构体,具体可以参考Parcel.cpp的Parcel::ipcSetDataReference函数。

Binder传输数据的大小限制
虽然APP开发时候,Binder对程序员几乎不可见,但是作为Android的数据运输系统,Binder的影响是全面性的,所以有时候如果不了解Binder的一些限制,在出现问题的时候往往是没有任何头绪,比如在Activity之间传输BitMap的时候,如果Bitmap过大,就会引起问题,比如崩溃等,这其实就跟Binder传输数据大小的限制有关系,在上面的一次拷贝中分析过,mmap函数会为Binder数据传递映射一块连续的虚拟地址,这块虚拟内存空间其实是有大小限制的,不同的进程可能还不一样。
1024) - (4096 *2) :这个限制定义在ProcessState类中,如果传输说句超过这个大小,系统就会报错,因为Binder本身就是为了进程间频繁而灵活的通信所设计的,并不是为了拷贝大数据而使用的:
#define BINDER_VM_SIZE ((1*1024*1024) - (4096 *2))
而在内核中,其实也有个限制,是4M,不过由于APP中已经限制了不到1M,这里的限制似乎也没多大用途:
static int binder_mmap(struct file *filp, struct vm_area_struct *vma){ int ret; struct vm_struct *area;
struct binder_proc *proc = filp->private_data;
const char *failure_string; struct binder_buffer *buffer;
//限制不能超过4M
if ((vma->vm_end - vma->vm_start) > SZ_4M)
vma->vm_end = vma->vm_start + SZ_4M;
。。。
}有个特殊的进程ServiceManager进程,它为自己申请的Binder内核空间是128K,这个同ServiceManager的用途是分不开的,ServcieManager主要面向系统Service,只是简单的提供一些addServcie,getService的功能,不涉及多大的数据传输,因此不需要申请多大的内存:
int main(int argc, char **argv){ struct binder_state *bs;
void *svcmgr = BINDER_SERVICE_MANAGER; // 仅仅申请了128k
bs = binder_open(128*1024); if (binder_become_context_manager(bs)) {
ALOGE("cannot become context manager (%s)\n", strerror(errno)); return -1;
}
svcmgr_handle = svcmgr;
binder_loop(bs, svcmgr_handler); return 0;
}系统服务与bindService等启动的服务的区别
服务可分为系统服务与普通服务,系统服务一般是在系统启动的时候,由SystemServer进程创建并注册到ServiceManager中的。而普通服务一般是通过ActivityManagerService启动的服务,或者说通过四大组件中的Service组件启动的服务。这两种服务在实现跟使用上是有不同的,主要从以下几个方面:
服务的启动方式
服务的注册与管理
服务的请求使用方式
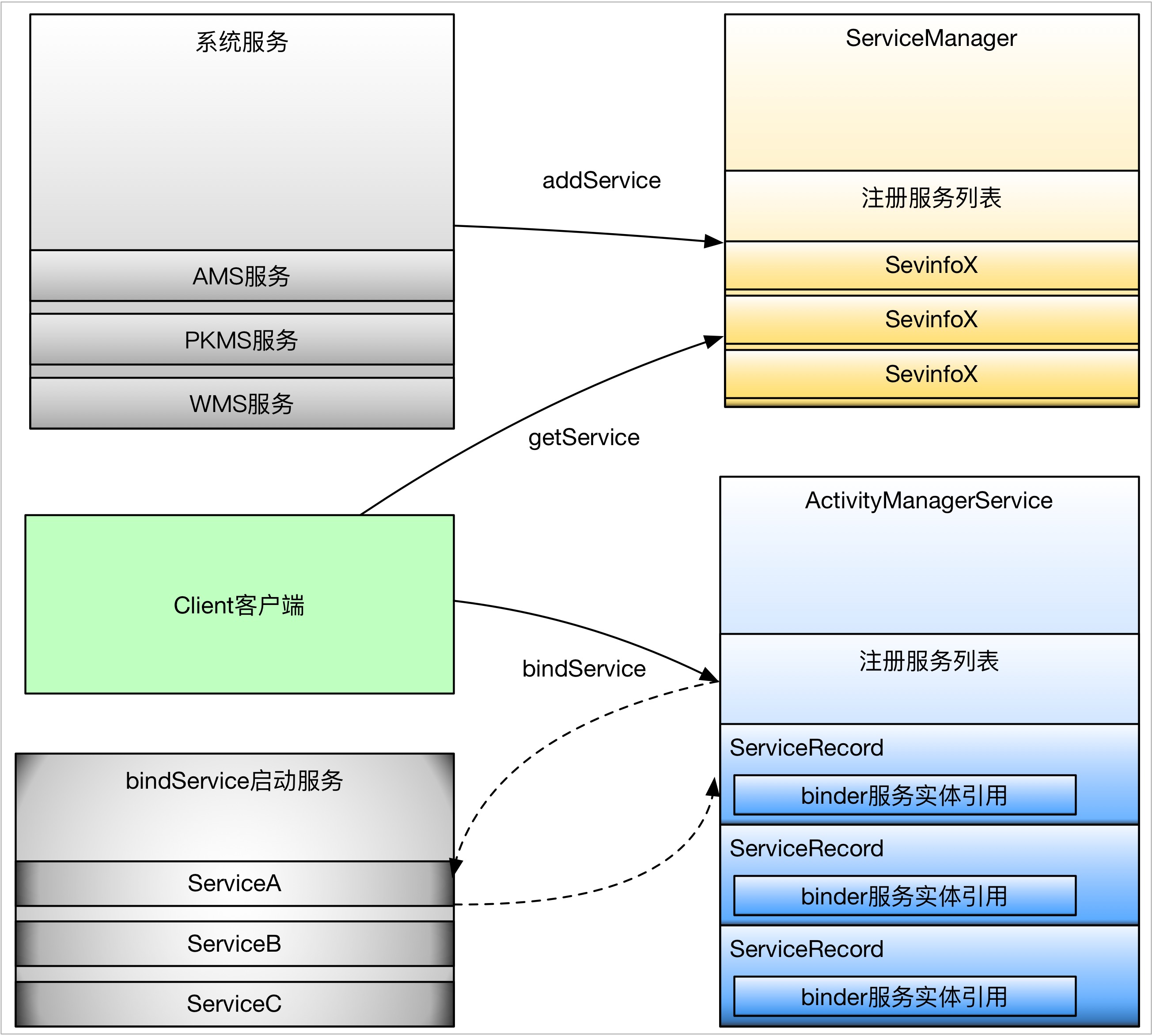
首先看一下服务的启动上,系统服务一般都是SystemServer进程负责启动,比如AMS,WMS,PKMS,电源管理等,这些服务本身其实实现了Binder接口,作为Binder实体注册到ServiceManager中,被ServiceManager管理,而SystemServer进程里面会启动一些Binder线程,主要用于监听Client的请求,并分发给响应的服务实体类,可以看出,这些系统服务是位于SystemServer进程中(有例外,比如Media服务)。在来看一下bindService类型的服务,这类服务一般是通过Activity的startService或者其他context的startService启动的,这里的Service组件只是个封装,主要的是里面Binder服务实体类,这个启动过程不是ServcieManager管理的,而是通过ActivityManagerService进行管理的,同Activity管理类似。
再来看一下服务的注册与管理:系统服务一般都是通过ServiceManager的addService进行注册的,这些服务一般都是需要拥有特定的权限才能注册到ServiceManager,而bindService启动的服务可以算是注册到ActivityManagerService,只不过ActivityManagerService管理服务的方式同ServiceManager不一样,而是采用了Activity的管理模型,详细的可以自行分析
最后看一下使用方式,使用系统服务一般都是通过ServiceManager的getService得到服务的句柄,这个过程其实就是去ServiceManager中查询注册系统服务。而bindService启动的服务,主要是去ActivityManagerService中去查找相应的Service组件,最终会将Service内部Binder的句柄传给Client。
Binder线程、Binder主线程、Client请求线程的概念与区别
Binder线程是执行Binder服务的载体,只对于服务端才有意义,对请求端来说,是不需要考虑Binder线程的,但Android系统的处理机制其实大部分是互为C/S的。比如APP与AMS进行交互的时候,都互为对方的C与S,这里先不讨论这个问题,先看Binder线程的概念。
Binder线程就是执行Binder实体业务的线程,一个普通线程如何才能成为Binder线程呢?很简单,只要开启一个监听Binder字符设备的Loop线程即可,在Android中有很多种方法,不过归根到底都是监听Binder,换成代码就是通过ioctl来进行监听。
拿ServerManager进程来说,其主线就是Binder线程,其做法是通过binder_loop实现不死线程:
void binder_loop(struct binder_state *bs, binder_handler func)
{
...
for (;;) { <!--关键点1-->
res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr); <!--关键点2-->
res = binder_parse(bs, 0, readbuf, bwr.read_consumed, func);
。。
}
}上面的关键代码1就是阻塞监听客户端请求,2 就是处理请求,并且这是一个死循环,不退出。再来看SystemServer进程中的线程,在Android4.3(6.0以后打代码就不一样了)中SystemSever主线程便是Binder线程,同时一个Binder主线程,Binder线程与Binder主线程的区别是:线程是否可以终止Loop,不过目前启动的Binder线程都是无法退出的,其实可以全部看做是Binder主线程,其实现原理是,在SystemServer主线程执行到最后的时候,Loop监听Binder设备,变身死循环线程,关键代码如下:
extern "C" status_t system_init()
{
...
ALOGI("System server: entering thread pool.\n");
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
ALOGI("System server: exiting thread pool.\n"); return NO_ERROR;
}ProcessState::self()->startThreadPool()是新建一个Binder主线程,而PCThreadState::self()->joinThreadPool()是将当前线程变成Binder主线程。其实startThreadPool最终也会调用joinThreadPool,看下其关键函数:
void IPCThreadState::joinThreadPool(bool isMain)
{
... status_t result; do { int32_t cmd;
...关键点1
result = talkWithDriver(); if (result >= NO_ERROR) {
...关键点2
result = executeCommand(cmd);
} // 非主线程的可以退出
if(result == TIMED_OUT && !isMain) { break;
} // 死循环,不完结,调用了这个,就好比是开启了Binder监听循环,
} while (result != -ECONNREFUSED && result != -EBADF);
}status_t IPCThreadState::talkWithDriver(bool doReceive)
{
do {
...关键点3
if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0)
}先看关键点1 talkWithDriver,其实质还是去掉用ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0)去不断的监听Binder字符设备,获取到Client传输的数据后,再通过executeCommand去执行相应的请求,joinThreadPool是普通线程化身Binder线程最常见的方式。不信,就再看一个MediaService,看一下main_mediaserver的main函数:
int main(int argc, char** argv){
。。。
sp<ProcessState> proc(ProcessState::self());
sp<IServiceManager> sm = defaultServiceManager();
ALOGI("ServiceManager: %p", sm.get());
AudioFlinger::instantiate();
MediaPlayerService::instantiate();
CameraService::instantiate();
AudioPolicyService::instantiate();
registerExtensions();
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
}其实还是通过joinThreadPool变身Binder线程,至于是不是主线程,看一下下面的函数:
void IPCThreadState::joinThreadPool(bool isMain)void ProcessState::spawnPooledThread(bool isMain)
{ if (mThreadPoolStarted) {
String8 name = makeBinderThreadName();
ALOGV("Spawning new pooled thread, name=%s\n", name.string());
sp<Thread> t = new PoolThread(isMain);
t->run(name.string());
}
}其实关键就是就是传递给joinThreadPool函数的isMain是否是true,不过是否是Binder主线程并没有什么用,因为源码中并没有为这两者的不同处理留入口,感兴趣可以去查看一下binder中的TIMED_OUT。
最后来看一下普通Client的binder请求线程,比如我们APP的主线程,在startActivity请求AMS的时候,APP的主线程成其实就是Binder请求线程,在进行Binder通信的过程中,Client的Binder请求线程会一直阻塞,知道Service处理完毕返回处理结果。
Binder请求的同步与异步
很多人都会说,Binder是对Client端同步,而对Service端异步,其实并不完全正确,在单次Binder数据传递的过程中,其实都是同步的。只不过,Client在请求Server端服务的过程中,是需要返回结果的,即使是你看不到返回数据,其实还是会有个成功与失败的处理结果返回给Client,这就是所说的Client端是同步的。至于说服务端是异步的,可以这么理解:在服务端在被唤醒后,就去处理请求,处理结束后,服务端就将结果返回给正在等待的Client线程,将结果写入到Client的内核空间后,服务端就会直接返回了,不会再等待Client端的确认,这就是所说的服务端是异步的,可以从源码来看一下:
Client端同步阻塞请求
status_t IPCThreadState::transact(int32_t handle,
uint32_t code, const Parcel& data,
Parcel* reply, uint32_t flags)
{
if (reply) {
err = waitForResponse(reply);
} ...Client在请求服务的时候 Parcel* reply基本都是非空的(还没见过空用在什么位置),非空就会执行waitForResponse(reply),如果看过几篇Binder分析文章的人应该都会知道,在A端向B写完数据之后,A会返回给自己一个BR_TRANSACTION_COMPLETE命令,告知自己数据已经成功写入到B的Binder内核空间中去了,如果是需要回复,在处理完BR_TRANSACTION_COMPLETE命令后会继续阻塞等待结果的返回:
status_t IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult){
... while (1) { if ((err=talkWithDriver()) < NO_ERROR) break;
cmd = mIn.readInt32(); switch (cmd) {
<!--关键点1 --> case BR_TRANSACTION_COMPLETE: if (!reply && !acquireResult) goto finish; break;
<!--关键点2 --> case BR_REPLY:
{
binder_transaction_data tr; // free buffer,先设置数据,直接
if (reply) { if ((tr.flags & TF_STATUS_CODE) == 0) { // 牵扯到数据利用,与内存释放
reply->ipcSetDataReference(...)
} goto finish;
}
finish:
...return err;
}关键点1就是处理BR_TRANSACTION_COMPLETE,如果需要等待reply,还要通过talkWithDriver等待结果返回,最后执行关键点2,处理返回数据。对于服务端来说,区别就在于关键点1 ,来看一下服务端Binder线程的代码,拿常用的joinThreadPool来看,在talkWithDriver后,会执行executeCommand函数,
void IPCThreadState::joinThreadPool(bool isMain)
{
... status_t result; do { int32_t cmd;
...关键点1
result = talkWithDriver(); if (result >= NO_ERROR) {
...关键点2
result = executeCommand(cmd);
} // 非主线程的可以退出
if(result == TIMED_OUT && !isMain) { break;
} // 死循环,不完结,调用了这个,就好比是开启了Binder监听循环,
} while (result != -ECONNREFUSED && result != -EBADF);
}executeCommand会进一步调用sendReply函数,看一下这里的特点waitForResponse(NULL, NULL),这里传递的都是null,在上面的关键点1的地方我们知道,这里不需要等待Client返回,因此会直接 goto finish,这就是所说的Client同步,而服务端异步的逻辑。
// BC_REPLYstatus_t IPCThreadState::sendReply(const Parcel& reply, uint32_t flags)
{ // flag 0
status_t err; status_t statusBuffer;
err = writeTransactionData(BC_REPLY, flags, -1, 0, reply, &statusBuffer); if (err < NO_ERROR) return err; return waitForResponse(NULL, NULL);
}case BR_TRANSACTION_COMPLETE:
if (!reply && !acquireResult) goto finish;
break;
请求同步最好的例子就是在Android6.0之前,国产ROM权限的申请都是同步的,在申请权限的时候,APP申请权限的线程会阻塞,就算是UI线程也会阻塞,ROM为了防止ANR,都会为权限申请设置一个倒计时,不操作,就给个默认操作,有兴趣可以自己分析。
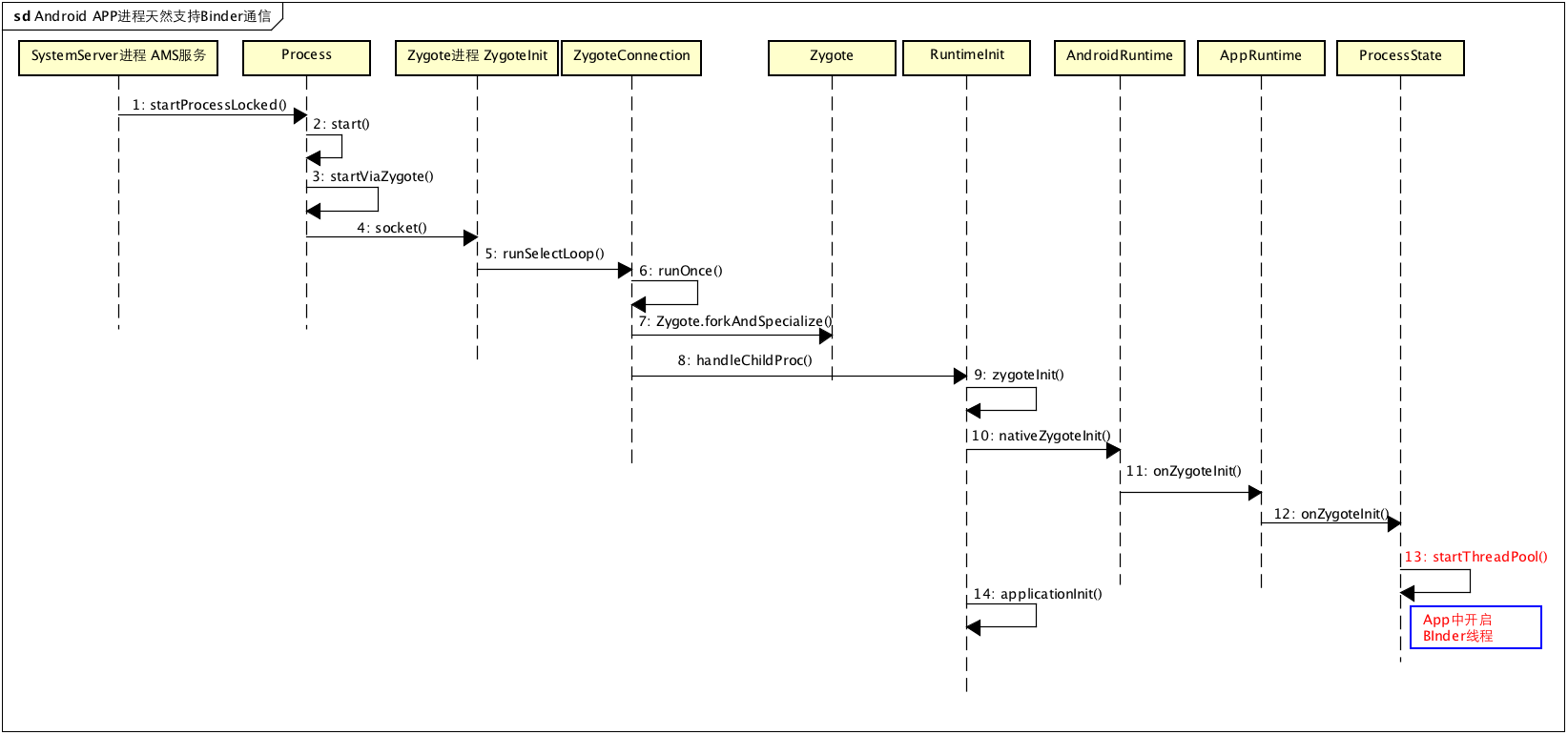
Android APP进程天生支持Binder通信的原理是什么
Android APP进程都是由Zygote进程孵化出来的。常见场景:点击桌面icon启动APP,或者startActivity启动一个新进程里面的Activity,最终都会由AMS去调用Process.start()方法去向Zygote进程发送请求,让Zygote去fork一个新进程,Zygote收到请求后会调用Zygote.forkAndSpecialize()来fork出新进程,之后会通过RuntimeInit.nativeZygoteInit来初始化Andriod APP运行需要的一些环境,而binder线程就是在这个时候新建启动的,看下面的源码(Android 4.3):
这里不分析Zygote,只是给出其大概运行机制,Zygote在启动后,就会通过runSelectLoop不断的监听socket,等待请求来fork进程,如下:
private static void runSelectLoop() throws MethodAndArgsCaller {
ArrayList<FileDescriptor> fds = new ArrayList<FileDescriptor>();
ArrayList<ZygoteConnection> peers = new ArrayList<ZygoteConnection>();
FileDescriptor[] fdArray = new FileDescriptor[4];
...
int loopCount = GC_LOOP_COUNT; while (true) { int index;
... boolean done;
done = peers.get(index).runOnce();
...
}}}每次fork请求到来都会调用ZygoteConnection的runOnce()来处理请求,
boolean runOnce() throws ZygoteInit.MethodAndArgsCaller {
String args[];
Arguments parsedArgs = null;
FileDescriptor[] descriptors;
。。。 try {
...关键点1
pid = Zygote.forkAndSpecialize(parsedArgs.uid, parsedArgs.gid, parsedArgs.gids,
parsedArgs.debugFlags, rlimits, parsedArgs.mountExternal, parsedArgs.seInfo,
parsedArgs.niceName);
}
try { if (pid == 0) { // in child
...关键点2
handleChildProc(parsedArgs, descriptors, childPipeFd, newStderr);
。。。
}runOnce()有两个关键点,关键点1 Zygote.forkAndSpecialize就是通过fork系统调用来新建进程,关键点2 handleChildProc就是对新建的APP进程进行一些初始化工作,为Android Java进程创建一些必须的场景。Zygote.forkAndSpecialize没什么可看的,就是Linux中的fork进程,这里主要看一下handleChildProc
private void handleChildProc(Arguments parsedArgs,
FileDescriptor[] descriptors, FileDescriptor pipeFd, PrintStream newStderr)
throws ZygoteInit.MethodAndArgsCaller {
//从Process.start启动的parsedArgs.runtimeInit一般都是true if (parsedArgs.runtimeInit) {
if (parsedArgs.invokeWith != null) {
WrapperInit.execApplication(parsedArgs.invokeWith,
parsedArgs.niceName, parsedArgs.targetSdkVersion,
pipeFd, parsedArgs.remainingArgs);
} else { // Android应用启动都走该分支
RuntimeInit.zygoteInit(parsedArgs.targetSdkVersion,
parsedArgs.remainingArgs);
}
}接着看 RuntimeInit.zygoteInit函数
public static final void zygoteInit(int targetSdkVersion, String[] argv)
throws ZygoteInit.MethodAndArgsCaller {
redirectLogStreams();
commonInit(); <!--关键点1-->
nativeZygoteInit(); <!--关键点2-->
applicationInit(targetSdkVersion, argv);
}先看关键点1,nativeZygoteInit属于Native方法,该方法位于AndroidRuntime.cpp中,其实就是调用调用到app_main.cpp中的onZygoteInit
static void com_android_internal_os_RuntimeInit_nativeZygoteInit(JNIEnv* env, jobject clazz){
gCurRuntime->onZygoteInit();
}关键就是onZygoteInit
virtual void onZygoteInit()
{
sp proc = ProcessState::self(); //启动新binder线程loop
proc->startThreadPool();
}首先,ProcessState::self()函数会调用open()打开/dev/binder设备,这个时候Client就能通过Binder进行远程通信;其次,proc->startThreadPool()负责新建一个binder线程,监听Binder设备,这样进程就具备了作为Binder服务端的资格。每个APP的进程都会通过onZygoteInit打开Binder,既能作为Client,也能作为Server,这就是Android进程天然支持Binder通信的原因。
Android APP有多少Binder线程,是固定的么?
通过上一个问题我们知道了Android APP线程为什么天然支持Binder通信,并且可以作为Binder的Service端,同时也对Binder线程有了一个了解,那么在一个Android APP的进程里面究竟有多少个Binder线程呢?是固定的吗。在分析上一个问题的时候,我们知道Android APP进程在Zygote fork之初就为它新建了一个Binder主线程,使得APP端也可以作为Binder的服务端,这个时候Binder线程的数量就只有一个,假设我们的APP自身实现了很多的Binder服务,一个线程够用的吗?这里不妨想想一下SystemServer进程,SystemServer拥有很多系统服务,一个线程应该是不够用的,如果看过SystemServer代码可能会发现,对于Android4.3的源码,其实一开始为该服务开启了两个Binder线程。还有个分析Binder常用的服务,media服务,也是在一开始的时候开启了两个线程。
先看下SystemServer的开始加载的线程:通过 ProcessState::self()->startThreadPool()新加了一个Binder线程,然后通过IPCThreadState::self()->joinThreadPool();将当前线程变成Binder线程,注意这里是针对Android4.3的源码,android6.0的这里略有不同。
extern "C" status_t system_init()
{
...
ALOGI("System server: entering thread pool.\n");
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
ALOGI("System server: exiting thread pool.\n"); return NO_ERROR;
}再看下Media服务,同SystemServer类似,也是开启了两个Binder线程:
int main(int argc, char** argv){ ...
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
}可以看出Android APP上层应用的进程一般是开启一个Binder线程,而对于SystemServer或者media服务等使用频率高,服务复杂的进程,一般都是开启两个或者更多。来看第二个问题,Binder线程的数目是固定的吗?答案是否定的,驱动会根据目标进程中是否存在足够多的Binder线程来告诉进程是不是要新建Binder线程,详细逻辑,首先看一下新建Binder线程的入口:
status_t IPCThreadState::executeCommand(int32_t cmd)
{
BBinder* obj;
RefBase::weakref_type* refs; status_t result = NO_ERROR; switch (cmd) {
... // 可以根据内核返回数据创建新的binder线程
case BR_SPAWN_LOOPER:
mProcess->spawnPooledThread(false); break;
}executeCommand一定是从Bindr驱动返回的BR命令,这里是BR_SPAWN_LOOPER,什么时候,Binder驱动会向进程发送BR_SPAWN_LOOPER呢?全局搜索之后,发现只有一个地方binder_thread_read,如果直观的想一下,什么时候需要新建Binder线程呢?很简单,不够用的时候,注意上面使用的是spawnPooledThread(false),也就是说这里启动的都是普通Binder线程。为了了解启动时机,先看一些binder_proc内部判定参数的意义:
struct binder_proc {
... int max_threads; // 进程所能启动的最大非主Binder线程数目
int requested_threads; // 请求启动的非主线程数
int requested_threads_started;//已经启动的非主线程数
int ready_threads; // 当前可用的Binder线程数
...
};再来看binder_thread_read函数中是么时候会去请求新建Binder线程,以Android APP进程为例子,通过前面的分析知道APP进程天然支持Binder通信,因为它有一个Binder主线程,启动之后就会阻塞等待Client请求,这里会更新proc->ready_threads,第一次阻塞等待的时候proc->ready_threads=1,之后睡眠。
binder_thread_read(){
...
retry: //当前线程todo队列为空且transaction栈为空,则代表该线程是空闲的 ,看看是不是自己被复用了
wait_for_proc_work = thread->transaction_stack == NULL &&
list_empty(&thread->todo);
...//可用线程个数+1
if (wait_for_proc_work)
proc->ready_threads++;
binder_unlock(__func__); if (wait_for_proc_work) {
... //当进程todo队列没有数据,则进入休眠等待状态
ret = wait_event_freezable_exclusive(proc->wait, binder_has_proc_work(proc, thread));
} else { if (non_block) {
...
} else
//当线程todo队列没有数据,则进入休眠等待状态
ret = wait_event_freezable(thread->wait, binder_has_thread_work(thread));
}
binder_lock(__func__); //被唤醒可用线程个数-1
if (wait_for_proc_work)
proc->ready_threads--;
thread->looper &= ~BINDER_LOOPER_STATE_WAITING;
... while (1) {
uint32_t cmd;
struct binder_transaction_data tr;
struct binder_work *w;
struct binder_transaction *t = NULL;
//先考虑从线程todo队列获取事务数据
if (!list_empty(&thread->todo)) {
w = list_first_entry(&thread->todo, struct binder_work, entry); //线程todo队列没有数据, 则从进程todo对获取事务数据
} else if (!list_empty(&proc->todo) && wait_for_proc_work) {
w = list_first_entry(&proc->todo, struct binder_work, entry);
} else {
}
.. if (t->buffer->target_node) {
cmd = BR_TRANSACTION; //设置命令为BR_TRANSACTION
} else {
cmd = BR_REPLY; //设置命令为BR_REPLY
}
..
done:
*consumed = ptr - buffer; //创建线程的条件
if (proc->requested_threads + proc->ready_threads == 0 &&
proc->requested_threads_started < proc->max_threads &&
(thread->looper & (BINDER_LOOPER_STATE_REGISTERED |
BINDER_LOOPER_STATE_ENTERED))) { //需要新建的数目线程数+1
proc->requested_threads++; // 生成BR_SPAWN_LOOPER命令,用于创建新的线程
put_user(BR_SPAWN_LOOPER, (uint32_t __user *)buffer);
} return 0;
}被Client唤醒后proc->ready_threads会-1,之后变成0,这样在执行到done的时候,就会发现proc->requested_threads + proc->ready_threads == 0,这是新建Binder线程的一个必须条件,再看下其他几个条件
if (proc->requested_threads + proc->ready_threads == 0 && proc->requested_threads_started < proc->max_threads && (thread->looper & (BINDER_LOOPER_STATE_REGISTERED | BINDER_LOOPER_STATE_ENTERED)))
proc->requested_threads + proc->ready_threads == 0 :如果目前还没申请新建Binder线程,并且proc->ready_threads空闲Binder线程也是0,就需要新建一个Binder线程,其实就是为了保证有至少有一个空闲的线程。
proc->requested_threads_started < proc->max_threads:目前启动的普通Binder线程数requested_threads_started还没达到上限(默认APP进程是15)
thread->looper & (BINDER_LOOPER_STATE_REGISTERED | BINDER_LOOPER_STATE_ENTERED) 当先线程是Binder线程,这个是一定满足的,不知道为什么列出来
proc->max_threads是多少呢?不同的进程其实设置的是不一样的,看普通的APP进程,在ProcessState::self()新建ProcessState单利对象的时候会调用ioctl(fd, BINDER_SET_MAX_THREADS, &maxThreads);设置上限,可以看到默认设置的上限是15。
static int open_driver(){ int fd = open("/dev/binder", O_RDWR);
... size_t maxThreads = 15;
result = ioctl(fd, BINDER_SET_MAX_THREADS, &maxThreads);
...
}如果满足新建的条件,就会将proc->requested_threads加1,并在驱动执行完毕后,利用put_user(BR_SPAWN_LOOPER, (uint32_t __user *)buffer);通知服务端在用户空间发起新建Binder线程的操作,新建的是普通Binder线程,最终再进入binder_thread_write的BC_REGISTER_LOOPER:
int binder_thread_write(struct binder_proc *proc, struct binder_thread *thread, void __user *buffer, int size, signed long *consumed)
{
... case BC_REGISTER_LOOPER:
... // requested_threads --
proc->requested_threads--;
proc->requested_threads_started++;
}
}这里会将proc->requested_threads复原,其实就是-1,并且启动的Binder线程数+1。
个人理解,之所以采用动态新建Binder线程的意义有两点,第一:如果没有Client请求服务,就保持线程数不变,减少资源浪费,需要的时候再分配新线程。第二:有请求的情况下,保证至少有一个空闲线程是给Client端,以提高Server端响应速度。
不过这里有一点要注意,对于同一个线程的请求,如果是阻塞的,那么没什么问题,肯定是等待上一个请求结束才能处理下一个,但是对于oneway方式的binder请求呢,这里就会存在这么一个场景,对于oneway的请求,如果上一个还没处理完,同一个线程的新的oneway请求会被塞到同一个目标线程等待执行,而不会触发创建新的Binder线程,因为这并不会妨碍另一端的处理,因为它压根无需等待,但是这可能会造成服务端单个线程任务繁重,而其他线程保持空闲,不过在一定程度上实现了同一种任务的顺序执行,可能也有一定的好处吧。







热门评论
-

慕粉42525962019-08-06 0
-

Coder_20192019-01-03 0
查看全部评论纠正一下,Zygote的IPC通信不支持Binder通信,采用的socket通信,因为fork进程需要单线程环境,而binder机制是多线程。子进程拷贝父进程资源时,容易造成死锁,状态不一致等情况。另外只有系统服务才能注册到ServiceManager,应用服务的binder句柄是注册到AMS的。
太难了 god.