什么是二叉查找树
在数据结构中,有一个奇葩的东西,说它奇葩,那是因为它重要,这就是树。而在树中,二叉树又是当中的贵族。二叉树的一个重要应用是它们在查找中的应用,于是就有了二叉查找树。 使二叉树成为一颗二叉查找树,需要满足以下两点:
对于树中的每个节点X,它的左子树中所有项的值都要小于X中的项;
对于树中的每个节点Y,它的右子树中所有项的值都要大于X中的项。
二叉查找树的基本操作
以下是对于二叉查找树的基本操作定义类,然后慢慢分析是如何实现它们的。
template<class T>
class BinarySearchTree
{
public:
// 构造函数,初始化root值
BinarySearchTree() : root(NULL){}
// 析构函数,默认实现
~BinarySearchTree() {}
// 查找最小值,并返回最小值
const T &findMin() const;
// 查找最大值,并返回最大值
const T &findMax() const;
// 判断二叉树中是否包含指定值的元素
bool contains(const T &x) const;
// 判断二叉查找树是否为空
bool isEmpty() const { return root ? false : true; }
// 打印二叉查找树的值
void printTree() const;
// 向二叉查找树中插入指定值
void insert(const T &x);
// 删除二叉查找树中指定的值
void remove(const T &x);
// 清空整个二叉查找树
void makeEmpty() const;
private:
// 指向根节点
BinaryNode<T> *root;
void insert(const T &x, BinaryNode<T> *&t) const;
void remove(const T &x, BinaryNode<T> *&t) const;
BinaryNode<T> *findMin(BinaryNode<T> *t) const;
BinaryNode<T> *findMax(BinaryNode<T> *t) const;
bool contains(const T &x, BinaryNode<T> *t) const;
void printTree(BinaryNode<T> *t) const;
void makeEmpty(BinaryNode<T> *&t) const;
};
findMin和findMax实现
根据二叉查找树的性质:
对于树中的每个节点X,它的左子树中所有项的值都要小于X中的项;
对于树中的每个节点Y,它的右子树中所有项的值都要大于X中的项。
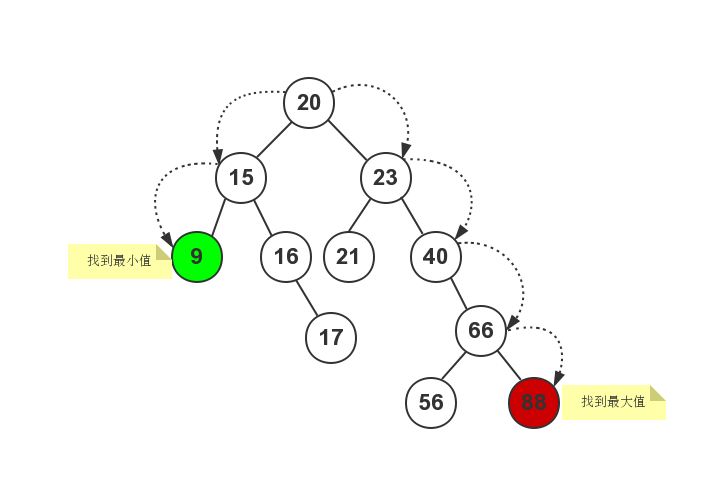
我们可以从root节点开始:
一直沿着左节点往下找,直到子节点等于
NULL为止,这样就可以找到最小值了;一直沿着右节点往下找,直到子节点等于
NULL为止,这样就可以找到最大值了。
如下图所示:
在程序中实现时,有两种方法:
使用递归实现;
使用非递归的方式实现。
对于finMin的实现,我这里使用递归的方式,代码参考如下:
BinaryNode<T> *BinarySearchTree<T>::findMin(BinaryNode<T> *t) const
{
if (t == NULL)
{
return NULL;
}
else if (t->left == NULL)
{
return t;
}
else
{
return findMin(t->left);
}
}
在findMin()的内部调用findMin(BinaryNode<T> *t),这样就防止了客户端知道了root根节点的信息。上面使用递归的方式实现了查找最小值,下面使用循环的方式来实现findMax。
template<class T>
BinaryNode<T> *BinarySearchTree<T>::findMax(BinaryNode<T> *t) const
{
if (t == NULL)
{
return NULL;
}
while (t->right)
{
t = t->right;
}
return t;
}
在很多面试的场合下,面试官一般都是让写出非递归的版本;而在对树进行的各种操作,很多时候都是使用的递归实现的,所以,在平时学习时,在理解递归版本的前提下,需要关心一下对应的非递归版本。
contains实现
contains用来判断二叉查找树是否包含指定的元素。代码实现如下:
template<class T>
bool BinarySearchTree<T>::contains(const T &x, BinaryNode<T> *t) const
{
if (t == NULL)
{
return false;
}
else if (x > t->element)
{
return contains(x, t->right);
}
else if (x < t->element)
{
return contains(x, t->left);
}
else
{
return true;
}
}
算法规则如下:
首先判断需要查找的值与当前节点值的大小关系;
当小于当前节点值时,就在左节点中继续查找;
当大于当前节点值时,就在右节点中继续查找;
当找到该值时,直接返回true。
insert实现
insert函数用来向儿茶查找树中插入新的元素,算法处理如下:
首先判断需要插入的值域当前节点值得大小关系;
当小于当前节点值时,就在左节点中继续查找插入点;
当大于当前节点值时,就在右节点中继续查找插入点;
当等于当前节点值时,什么也不干。
代码实现如下:
template<class T>
void BinarySearchTree<T>::insert(const T &x, BinaryNode<T> *&t) const
{
if (t == NULL)
{
t = new BinaryNode<T>(x, NULL, NULL);
}
else if (x < t->element)
{
insert(x, t->left);
}
else if (x > t->element)
{
insert(x, t->right);
}
}
remove实现
remove函数用来删除二叉查找树中指定的元素值,这个处理起来比较麻烦。在删除子节点时,需要分以下几种情况进行考虑(结合下图进行说明): 如下图所示:
需要删除的子节点,它没有任何子节点;例如图中的节点9、节点17、节点21、节点56和节点88;这些节点它们都没有子节点;
需要删除的子节点,只有一个子节点(只有左子节点或右子节点);例如图中的节点16和节点40;这些节点它们都只有一个子节点;
需要删除的子节点,同时拥有两个子节点;例如图中的节点66等。
对于情况1,直接删除对应的节点即可;实现起来时比较简单的;
对于情况2,直接删除对应的节点,然后用其子节点占据删除掉的位置;
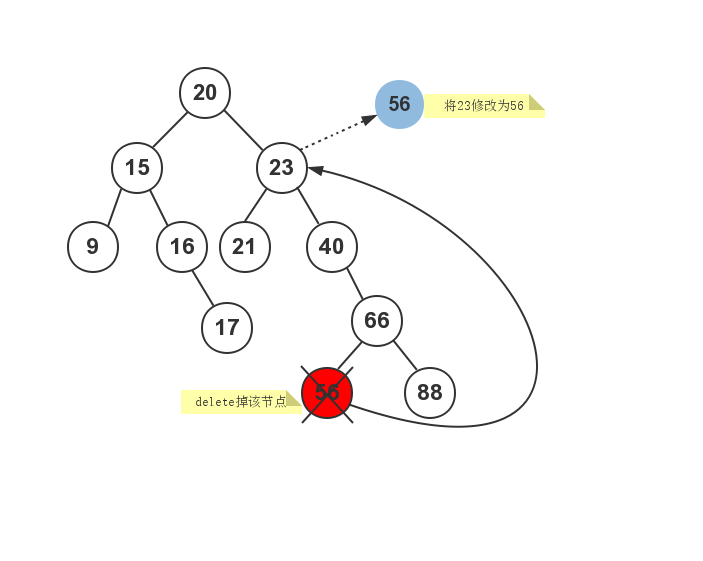
对于情况3,是比较复杂的。首先在需要被删除节点的右子树中找到最小值节点,然后使用该最小值替换需要删除节点的值,然后在右子树中删除该最小值节点。
假如现在需要删除包含值23的节点,步骤如下图所示:
代码实现如下:
template<class T>
void BinarySearchTree<T>::remove(const T &x, BinaryNode<T> *&t) const
{
if (t == NULL)
{
return;
}
if (x < t->element)
{
remove(x, t->left);
}
else if (x > t->element)
{
remove(x, t->right);
}
else if (t->left != NULL && t->right != NULL)
{
// 拥有两个子节点
t->element = findMin(t->right)->element;
remove(t->element, t->right);
}
else if (t->left == NULL && t->right == NULL)
{
// 没有子节点,直接干掉
delete t;
t = NULL;
}
else if (t->left == NULL || t->right == NULL)
{
// 拥有一个子节点
BinaryNode *pTemp = t;
t = (t->left != NULL) ? t->left : t->right;
delete pTemp;
}
}
makeEmpty实现
makeEmpty函数用来释放整个二叉查找树占用的内存空间,同理,也是使用的递归的方式来实现的。具体代码请下载文中最后提供的源码。
总结
这篇文章对数据结构中非常重要的二叉查找树进行了详细的总结,虽然二叉查找树非常重要,但是理解起来还是非常容易的,主要是需要掌握对递归的理解。如果对递归有非常扎实的理解,那么对于树的一些操作,那都是非常好把握的,而理解二叉查找树又是后续的AVL平衡树和红黑树的基础,希望这篇文章对大家有帮助。