1.消息队列简介
计算机软件发展的一个重要目标是降低软件耦合性;
网站架构中,系统解耦合的重要手段就是异步,业务之间的消息传递不是同步调用,而是将一个业务操作分为多个阶段,每个阶段之间通过共享数据的方式异步执行;
在分布式系统中,多个服务器集群通过分布式消息队列实现异步;分布式消息队列可以看作是内存队列的分布式部署;
分布式消息队列架构图通常如下所示:
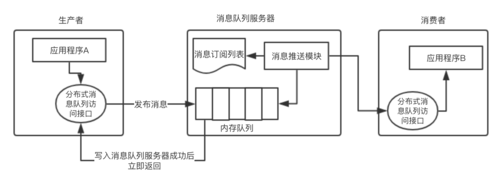
消息队列是典型的生产者消费者模式,两者不存在直接调用,只要保持数据结构不变,彼此功能实现可以随意改变而不互相影响;异步消息队列还有以下特点:
提高系统可用性:消费者服务器发生故障时,生产者服务器可以继续处理业务请求,系统整体表现无故障;此时数据会在消息队列服务器堆积,待消费者服务器恢复后,可以继续处理消息队列中的数据;
加快网站相应速度:业务处理前端的生产者服务器在处理完业务请求后,将数据写入消息队列,不需要等待消费者服务器处理就可以返回,减少响应延迟;
消除并发访问高峰:用户访问是随机的,存在高峰和低谷;可以使用消息队列将突然增加的访问请求数据放入消息队列中,等待消费者服务器依次处理;
消费者消费消息时,通常有两种模式可以选择:拉模型与推模型。
拉模型是由消息的消费者发起的,主动权把握在消费者手中,它会根据自己的情况对生产者发起调用;
推模式消费者只会被动接受消息,消息队列一旦发现消息进入,就会通知消费者执行对消息的处理;
2.beanstalkd基本知识
2.1beanstalkd简介
beanstalkd是一个轻量级的消息队列;主要有一下特点:
拉模式,消费者需要主动从服务器拉取消息数据;
tube:类似于消息主题topic,一个beanstalkd中可以支持多个tube,每个tube都有自己的producer和consumer;多个生产者可以往同一个tube生产job,多个消费者也能监听同一个tube获取job;
job:代替了传统的message,与消息最大的区别是,job有多种状态;
conn:代表一个客户端链接;
优先级:job可以有0~2^32个优先级,0代表最高优先级,beanstalkd使用堆处理job的优先级排序,因此reserve命令的时间复杂度是O(logN);
延时:生产者发布任务时可以指定延时,到达延迟时间后,job才能被消费者消费;
超时机制:消费者从beanstalkd获取一个job后,必须在预设的 TTR (time-to-run) 时间内处理完任务,并发送 delete / release/ bury 命令改变任务状态;否则 Beanstalkd 会认为消息消费失败,重置job状态,使其可以被其他消费者消费。如果消费者预计在 TTR (time-to-run) 时间内无法完成任务, 也可以发送 touch 命令, 它的作用是让 Beanstalkd 从重新计时TTR;
暂停:pause命令可以暂停当前tube,暂停时期内所有job都不能够被消费者消费;
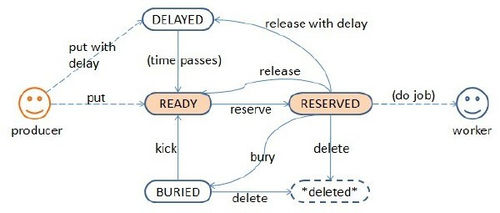
job有一下几种状态:
READY,需要立即处理的任务,当延时 (DELAYED) 任务到期后会自动成为当前任务;
DELAYED,延迟执行的任务,;
RESERVED,已经被消费者获取, 正在执行的任务,Beanstalkd 负责检查任务是否在 TTR(time-to-run) 内完成;
BURIED,保留的任务: 任务不会被执行,也不会消失,除非有人将他修改为其他状态;
DELETED,消息被彻底删除。Beanstalkd 不再维持这些消息。
状态之间的转移图如下所示:
思考:
beanstalkd如何维护job的状态?tube有3个集合delay、ready和 buried分别存放对应状态的job,conn的reserved_jobs集合存储状态为reserved的job(消费者获取一个job后,job的状态才会改变为reserved,因此这个集合由conn维护);
delay状态的job怎么修改为ready?delay集合是一个按照时间排序的最小堆,beanstalkd不定时循环从堆根节点获取job,校验是否需要改变其状态未ready;
如何实现优先级?只有ready状态的job才能被消费者获取消费,ready集合是一个按照优先级排序的最小堆,根节点始终是优先级最高得job;
拉模式实现?消费者使用reserve命令获取job,beanstalkd检查消费者监听的所有tube,查找到ready的job即返回,否则阻塞消费者知道有ready状态的job产生为止;
2.2beanstalkd命令
beanstalkd支持以下命令:
命令 | 含义 |
|---|---|
| use <tube> | 使用指定tube |
| watch <tube> | 监听指定tube |
| ignore <tube> | 取消监听指定tube |
| list-tubes | 列出所有的tube |
| list-tube-used | 列出当前客户端使用的tube |
| list-tubes-watched | 列出当前客户端监听的所有tube |
| pause-tube <tube> | 暂停指定tube,暂停期间所有job都不能再被消费者消费 |
put <pri> <delay> <ttr> <data-size>\r\n <data>\r\n | 生产者发布job |
reserve
RESERVED <id> <data-size>\r\n <data>\r\n | 获取job,如果客户端监视的所有tube都没有ready状态的tube,阻塞客户端;否则返回job |
| reserve-with-timeout <timeout> | 通reserve,只是设置最大阻塞时间 |
| peek <id> | 返回id对应的job |
| peek-ready | 返回下一个ready的job |
| peek-delay | 返回剩余时间最短的delay状态的job |
| peek-buried | 返回下一个buried列表中的job |
| release <id> <pri> <delay> | 将一个reserved状态的job重置为ready状态 |
| bury <id> <pri> | 将job的状态设置为buried |
| kick | 将buried状态的job迁移为ready,或将delay状态的job迁移为ready |
| kick-job <id> | 将一个job的状态迁移为ready |
| delete <id> | 删除一个job |
| touch <id> | 客户端reserve获取job后,发现没有足够时间处理此job,发送touch命令,放服务器重新开始计时TTR |
| stats-job <id> | 查询job状态 |
| stats-tube <tube> | 查询tube状态 |
| stats | 查询服务器统计信息 |
| quit | 退出 |
3.1数据结构
3.1.1基础结构体
//堆struct Heap { int cap; //堆容量
int len; //堆元素数目
void **data; //元素数组
Less less; //元素比较的函数指针
Record rec; //函数指针,将元素插入堆时,会调用此函数};
//函数指针定义:typedef int(*Less)(void*, void*);typedef void(*Record)(void*, int);
//API:元素的插入与删除void * heapremove(Heap *h, int k);int heapinsert(Heap *h, void *x)//集合struct ms { size_t used, cap, last; //cap为当前集合容量;used集合中元素数目;last上次访问的集合元素的位置
void **items; //存储元素的数组
ms_event_fn oninsert, onremove; //往集合插入元素,删除元素时调用的函数};
//函数指针定义如下typedef void(*ms_event_fn)(ms a, void *item, size_t i);
//APIvoid ms_init(ms a, ms_event_fn oninsert, ms_event_fn onremove);//初始化集合int ms_append(ms a, void *item) //往集合追加元素int ms_contains(ms a, void *item)//判断集合是否包含元素void * ms_take(ms a) //获取并删除元素(会从上次访问的位置last开始查找)int ms_remove(ms a, void *item) //删除元素,从头开始查找int ms_clear(ms a) //清空集合3.1.2 管道tube
struct tube {
uint refs; //引用计数
char name[MAX_TUBE_NAME_LEN]; //名称
Heap ready; //存储状态未ready的job,按照优先级排序
Heap delay; //存储状态未delayed的job,按照到期时间排序
struct ms waiting; //等待当前tube有job产生的消费者集合
int64 pause; //执行pause命令后,pause字段记录暂停时间
int64 deadline_at; //deadline_at记录暂停到达时间
struct job buried; //存储状态为buried的job,是一个链表};创建tube的代码如下:
tube make_tube(const char *name)
{
tube t;
//底层调用malloc分配空间
t = new(struct tube); if (!t) return NULL;
t->name[MAX_TUBE_NAME_LEN - 1] = '\0'; strncpy(t->name, name, MAX_TUBE_NAME_LEN - 1); if (t->name[MAX_TUBE_NAME_LEN - 1] != '\0') twarnx("truncating tube name");
//设置ready与delay堆的函数指针
t->ready.less = job_pri_less; t->delay.less = job_delay_less; t->ready.rec = job_setheappos; t->delay.rec = job_setheappos; t->buried = (struct job) { }; t->buried.prev = t->buried.next = &t->buried; ms_init(&t->waiting, NULL, NULL);
return t;
}两个堆指针函数如下:
//按照优先级比较int job_pri_less(void *ax, void *bx)
{
job a = ax, b = bx; if (a->r.pri < b->r.pri) return 1; if (a->r.pri > b->r.pri) return 0; return a->r.id < b->r.id;
}//按照过期时间比较int job_delay_less(void *ax, void *bx)
{
job a = ax, b = bx; if (a->r.deadline_at < b->r.deadline_at) return 1; if (a->r.deadline_at > b->r.deadline_at) return 0; return a->r.id < b->r.id;
}//设置每个job在堆的indexvoid job_setheappos(void *j, int pos)
{
((job)j)->heap_index = pos;
}3.1.3任务job
注:job创建完成后,先会保存在全局变量all_jobs的hash表中;然后才会插入到tube的各job队列中;
struct job {
Jobrec r; // 存储job信息
tube tube; //指向其所属tube
job prev, next; //job可以组织为双向链表(buried状态的job就是链表)
job ht_next; //所有的job都存储在一个hash表中(拉链法),job的id为hash值;(tube中的job集合存储指针指向各个job)
size_t heap_index; /* where is this job in its current heap */
…………
char body[];//job的数据,柔性数组};
// job的描述信息struct Jobrec { uint64 id; uint32 pri; int64 delay; int64 ttr; int32 body_size; int64 created_at; //创建时间
int64 deadline_at; //延迟job的过期时间
//统计计数
uint32 reserve_ct; uint32 timeout_ct; uint32 release_ct; uint32 bury_ct; uint32 kick_ct;
byte state;//当前状态};3.14套接字socket
struct Socket { int fd;
Handle f; //socket发生事件时的处理函数
void *x; //服务器监听的socket指向server结构体;客户端对应的socket指向conn结构体
int added; //往epoll注册事件时,计算操作类型};3.15服务器server
struct Server { char *port; char *addr;
Socket sock; //监听的socket
Heap conns; //存储即将有事件发生的客户端;按照事件发生的时间排序的最小堆;
//例如:当客户端获取job后,若唱过TTR时间没处理完,job会状态应重置为ready状态;
//当客户端调用reserve获取job但当前tube没有ready状态的job时,客户端会被阻塞timeout时间;};3.1.6客户端链接conn
struct Conn { Server *srv; //执行服务器
Socket sock; //客户端socket
char state; //客户端状态:等待接收命令,等待接收数据,等待回复命令,等待返回job,关闭,获取job阻塞中
char type; //客户端类型:生产者,消费者,获取job阻塞中
Conn *next;
tube use; //当前使用的tube;put命令发布的job会插入到当前tube中
int64 tickat; //客户端处理job的TTR到期时间;或者客户端阻塞的到期时间;用于在server的conns堆比较
int tickpos; // 在srv->conns堆里的位置
job soonest_job; //所有reserve任务里到期时间最近的job
int rw; //当前关心的事件: 'r', 'w', or 'h'(读、写、关闭连接)
int pending_timeout; //客户端获取job而阻塞的到期时间
char halfclosed; //表示客户端断开连接
char cmd[LINE_BUF_SIZE]; // 输入缓冲区
int cmd_len; int cmd_read;
char *reply; //输出缓冲区
int reply_len; int reply_sent; char reply_buf[LINE_BUF_SIZE];
//put命令发布job时,从客户端读入的job
int in_job_read;
job in_job;
//待返回给客户端的job
job out_job; int out_job_sent;
//当前客户端监听的所有tube集合
struct ms watch; //当前客户端的所有reserved状态的job
struct job reserved_jobs;
};3.2 服务器启动过程
3.2.1 epoll简介
epoll结构体:
typedef union epoll_data { void *ptr; int fd; __uint32_t u32; __uint64_t u64;
} epoll_data_t;//保存触发事件的某个fd相关的数据
struct epoll_event { __uint32_t events; /* epoll event */
epoll_data_t data; /* User data variable */};//其中events表示感兴趣的事件和被触发的事件,可能的取值为://EPOLLIN:表示对应的文件描述符可以读;//EPOLLOUT:表示对应的文件描述符可以写;//EPOLLPRI:表示对应的文件描述符有紧急的数可读;//EPOLLERR:表示对应的文件描述符发生错误;//EPOLLHUP:表示对应的文件描述符被挂断;epoll API定义如下:
int epoll_create(int size) //生成一个epoll专用的文件描述符,其中的参数是指定生成描述符的最大范围; int epoll_ctl(int epfd, int op, int fd, struct epoll_event *event) //用于控制某个文件描述符上的事件,可以注册事件,修改事件,删除事件 int epoll_wait(int epfd,struct epoll_event * events,int maxevents,int timeout) //轮询I/O事件的发生;
3.2.2 beanstalkd使用epoll
//创建epoll:epfd = epoll_create(1);
//注册事件int sockwant(Socket *s, int rw){
…………
ev.events |= EPOLLRDHUP | EPOLLPRI;
ev.data.ptr = s; //注意:传入的是sokcet指针;(socket的x字段会指向server或者conn结构体,当socket对应的fd发生事件时,可以得到server或conn对象)
return epoll_ctl(epfd, op, s->fd, &ev);
}
//等待事件发生//返回h r w 事件类型int socknext(Socket **s, int64 timeout){
…………
r = epoll_wait(epfd, &ev, 1, (int)(timeout/1000000)); if (r == -1 && errno != EINTR) {
twarn("epoll_wait"); exit(1);
}
if (r > 0) {
*s = ev.data.ptr; //返回发生事件的socket
if (ev.events & (EPOLLHUP|EPOLLRDHUP)) { return 'h';
} else if (ev.events & EPOLLIN) { return 'r';
} else if (ev.events & EPOLLOUT) { return 'w';
}
} return 0;
}3.2.3服务器启动
int main(int argc, char **argv)
{
optparse(&srv, argv+1);//解析输入参数
r = make_server_socket(srv.addr, srv.port); //创建socket
prot_init(); //初始化全局tubes集合,创建名称为default的默认tube
srvserve(&srv);//启动服务器
return 0;
}
struct ms tubes;//全局变量
void prot_init()
{ //初始化tube集合
ms_init(&tubes, NULL, NULL);
//创建默认tube;tube_find_or_make方法会先从tubes集合查找指定名称为tube,查找到直接返回;否则创建新的tube
TUBE_ASSIGN(default_tube, tube_find_or_make("default"));
}
void srvserve(Server *s)
{ //s->sock为server监听的socket;设置其处理函数为srvaccept;
s->sock.x = s; s->sock.f = (Handle)srvaccept; s->conns.less = (Less)connless; //设置s->conns堆的函数指针 s->conns.rec = (Record)connrec;
r = listen(s->sock.fd, 1024); //监听
r = sockwant(&s->sock, 'r'); //注册到epoll
//开启循环
for (;;) { //服务器有一些事件需要在特定时间执行,获得最早待执行事件的时间间隔,作为epoll_wait的等待时间;后面详细分析函数内部
period = prottick(s);
int rw = socknext(&sock, period); //epoll wait
if (rw) { sock->f(sock->x, rw); //调用socket的处理函数
}
}
}//至此,服务器启动完毕,等待客户端链接conns堆分析:
上面说过,conns存储即将有事件发生的客户端;按照事件发生的时间排序的最小堆;
例如:当客户端获取job后,若唱过TTR时间没处理完,job会状态应重置为ready状态;
当客户端调用reserve获取job但当前tube没有ready状态的job时,客户端会被阻塞timeout时间;
//堆节点比较的函数指针:int connless(Conn *a, Conn *b){ return a->tickat < b->tickat;
}
//将客户端对象插入conns堆时,tickpos记录其插入的index(避免客户端重复插入;插入之前发现其tickpos>-1则先删除再插入)void connrec(Conn *c, int i){
c->tickpos = i;
}处理客户端链接请求:
void srvaccept(Server *s, int ev)
{ h_accept(s->sock.fd, ev, s);
}
void h_accept(const int fd, const short which, Server *s)
{
cfd = accept(fd, (struct sockaddr *)&addr, &addrlen);
flags = fcntl(cfd, F_GETFL, 0); //获得fd标识
r = fcntl(cfd, F_SETFL, flags | O_NONBLOCK); //设置fd非阻塞,使用epoll必须设置非阻塞,负责epoll无法同时监听多个fd
//创建conn对象;默认监听default_tube(c->watch存储所有监听的tube);默认使用default_tube(c->use)
//注意:初始化conn对象时,客户端状态为STATE_WANTCOMMAND,即等待接收客户端命令;
c = make_conn(cfd, STATE_WANTCOMMAND, default_tube, default_tube);
c->srv = s; c->sock.x = c; c->sock.f = (Handle)prothandle; //设置客户端处理函数
c->sock.fd = cfd;
r = sockwant(&c->sock, 'r'); //epoll注册,监听可读事件}当客户端socket可读或可写时,会执行prothandle函数:
static void prothandle(Conn *c, int ev){
h_conn(c->sock.fd, ev, c);
}
static void h_conn(const int fd, const short which, Conn *c){ //客户端断开链接,标记
if (which == 'h') {
c->halfclosed = 1;
}
//客户端数据交互(根据客户端状态不同执行不同的读写操作)
conn_data(c); //解析完命令时,执行命令
while (cmd_data_ready(c) && (c->cmd_len = cmd_len(c))) do_cmd(c);
}3.3 服务器与客户端的数据交互
beanstalkd将客户端conn分为以下几种状态:等待接受命令,等待接收数据,等待回复数据,等待返回job等;
#define STATE_WANTCOMMAND 0#define STATE_WANTDATA 1#define STATE_SENDJOB 2#define STATE_SENDWORD 3#define STATE_WAIT 4#define STATE_BITBUCKET 5#define STATE_CLOSE 6
当客户端fd可读或者可写时,服务器根据当前客户端的状态执行不同的操作:
注意:TCP是基于流的,因此存在半包、粘包问题;即,服务器一次read的命令请求数据可能不完整,或者一次read多个命令请求的数据;
//有些状态操作已省略static void conn_data(Conn *c)
{
switch (c->state) {
case STATE_WANTCOMMAND: r = read(c->sock.fd, c->cmd + c->cmd_read, LINE_BUF_SIZE - c->cmd_read); //读取命令到输入缓冲区cmd
c->cmd_read += r;
c->cmd_len = cmd_len(c); //定位\r\n,并返回命令请求开始位置到\r\n长度;如果没有\r\b说明命令请求不完全,返回0
if (c->cmd_len) return do_cmd(c); //如果读取完整的命令,则处理;否则意味着命令不完全,需要下次继续接收
break;
case STATE_WANTDATA: //只有当使用put命令发布任务时,才会携带数据;客户端状态才会成为STATE_WANTDATA;
//而读取命令行时,已经携带了任务的必要参数,那时已经创建了任务,并存储在c->in_job字段
j = c->in_job;
r = read(c->sock.fd, j->body + c->in_job_read, j->r.body_size -c->in_job_read); //读取任务数据
c->in_job_read += r; //记录任务读取了多少数据
maybe_enqueue_incoming_job(c); //函数会判断任务数据是否已经读取完全,完全则将任务写入tube的ready或delay队列;后面会将
break;
case STATE_SENDWORD: //回复客户端命令请求
r= write(c->sock.fd, c->reply + c->reply_sent, c->reply_len - c->reply_sent);
c->reply_sent += r; //已经发送的字节数
if (c->reply_sent == c->reply_len) return reset_conn(c); //如果返回数据已经发完,则重置客户端rw,关心可读事件;否则继续待发送数据状态
break;
case STATE_SENDJOB: //待发送job
j = c->out_job;
//返回数据与job
iov[0].iov_base = (void *)(c->reply + c->reply_sent); iov[0].iov_len = c->reply_len - c->reply_sent; /* maybe 0 */
iov[1].iov_base = j->body + c->out_job_sent; iov[1].iov_len = j->r.body_size - c->out_job_sent;
r = writev(c->sock.fd, iov, 2);
c->reply_sent += r; if (c->reply_sent >= c->reply_len) { c->out_job_sent += c->reply_sent - c->reply_len; c->reply_sent = c->reply_len;
}
if (c->out_job_sent == j->r.body_size) { //如果job的数据已经发完,则重置客户端rw,关心可读事件;否则继续待发送job
return reset_conn(c);
}
break;
}
}3.4 命令的处理过程
3.4.1查找命令
//命令执行的入口函数static void do_cmd(Conn *c)
{
dispatch_cmd(c); //分发并执行命令
fill_extra_data(c); //put命令时,不仅需要执行命令,还需要接续job数据}
static voiddispatch_cmd(Conn *c)
{ //查找命令类型
type = which_cmd(c);
//switch处理各个命令
switch (type) {
…………
}
}beanstalkd有以下命令定义:
//命令字符串#define CMD_PUT "put "#define CMD_PEEK_READY "peek-ready"#define CMD_RESERVE "reserve"#define CMD_RELEASE "release "………… //命令编码类型:#define OP_UNKNOWN 0#define OP_PUT 1#define OP_PEEKJOB 2#define OP_RESERVE 3#define OP_DELETE 4#define OP_RELEASE 5…………
查找命令其实就是字符串比较:
static int which_cmd(Conn *c)
{ //宏定义;比较输入缓冲区命令字符串与命令表中字符串比较,返回命令类型
#define TEST_CMD(s,c,o) if (strncmp((s), (c), CONSTSTRLEN(c)) == 0) return (o);
//宏替换后就是一系列if语句
TEST_CMD(c->cmd, CMD_PUT, OP_PUT); TEST_CMD(c->cmd, CMD_PEEKJOB, OP_PEEKJOB);
…………
}3.4.2命令1——发布任务
case OP_PUT:
r = read_pri(&pri, c->cmd + 4, &delay_buf); //解析优先级pri
r = read_delay(&delay, delay_buf, &ttr_buf); //解析delay
r = read_ttr(&ttr, ttr_buf, &size_buf); //解析ttr
body_size = strtoul(size_buf, &end_buf, 10); //解析job字节数
op_ct[type]++; //统计
if (body_size > job_data_size_limit) { //job长度超过限制;返回
return skip(c, body_size + 2, MSG_JOB_TOO_BIG);
}
//put,说明是生产者,设置conn类型为生产者
connsetproducer(c);
//初始化job结构体,存储在hash表all_jobs中
c->in_job = make_job(pri, delay, ttr, body_size + 2, c->use);
//解析客户端发来的任务数据,存储在c->in_job的body数据字段
fill_extra_data(c);
//校验job数据是否读取完毕,完了则入tube的队列
maybe_enqueue_incoming_job(c);任务入队列:
static void maybe_enqueue_incoming_job(Conn *c)
{ job j = c->in_job;
//任务数据已经读取完毕,入队列(ready或者delay队列)
if (c->in_job_read == j->r.body_size) return enqueue_incoming_job(c);
//任务数据没有读取完毕,则设置客户端conn状态未等待接收数据STATE_WANTDATA
c->state = STATE_WANTDATA;
}
static void enqueue_incoming_job(Conn *c)
{
int r; job j = c->in_job;
c->in_job = NULL; /* the connection no longer owns this job */
c->in_job_read = 0;
//入队列
r = enqueue_job(c->srv, j, j->r.delay, 1);
//返回数据;并设置conn状态为STATE_SENDWORD
reply_line(c, STATE_SENDWORD, MSG_BURIED_FMT, j->r.id);
}
static int enqueue_job(Server *s, job j, int64 delay, char update_store)
{
int r;
j->reserver = NULL; if (delay) { //入delay队列,设置任务的deadline_at
j->r.deadline_at = nanoseconds() + delay; r = heapinsert(&j->tube->delay, j);
j->r.state = Delayed;
} else { //入ready队列
r = heapinsert(&j->tube->ready, j); if (!r) return 0; j->r.state = Ready;
}
//检查有没有消费者正在阻塞等待此tube产生job,若有需要返回job;
process_queue();
return 1;
}返回命令回复给客户端:
//reply_line函数组装命令回复数据,调用reply函数;只是将数据写入到输出缓冲区,并修改了客户端状态为STATE_SENDWORD,实际发送数据在3.3节已经说过;static void reply(Conn *c, char *line, int len, int state)
{ if (!c) return;
connwant(c, 'w');//修改关心的事件为可写事件
c->next = dirty; //放入dirty链表
dirty = c; c->reply = line; //输出数据缓冲区
c->reply_len = len; c->reply_sent = 0; c->state = state; //设置conn状态}connwant函数实现如下:
void connwant(Conn *c, int rw)
{ c->rw = rw; //c->rw记录当前客户端关心的socket事件
connsched(c);
}
void connsched(Conn *c)
{ if (c->tickpos > -1) { //c->tickpos记录当前客户端在srv->conns堆的索引;(思考:tickpos在什么时候赋值的?heap的函数指针rec) heapremove(&c->srv->conns, c->tickpos);
} c->tickat = conntickat(c); //计算当前客户端待发生的某个事件的时间
if (c->tickat) { heapinsert(&c->srv->conns, c); //插入srv->conns堆
}
}问题1:connwant只是修改了conn的rw字段为‘w’,表示关心客户端的读时间,什么时候调用epoll注册呢?dirty链表又是做什么的呢?
beanstalkd有个函数update_conns负责更新客户端socket的事件到epoll;其在每次循环开始,执行epoll_wait之前都会执行;
static void update_conns()
{
int r;
Conn *c;
while (dirty) { //遍历dirty链表,更新每一个conn关心的socket事件
c = dirty; dirty = dirty->next; c->next = NULL; r = sockwant(&c->sock, c->rw); if (r == -1) {
twarn("sockwant");
connclose(c);
}
}
}问题2:srv->conns存储的客户端都是在某个时间点有事件待处理的,客户端都有哪些事件需要处理呢?
1)消费者获取job后,job的状态改为reserved,当TTR时间过后,如果客户端还没有处理完这个job,服务器会将这个job的状态重置为ready,以便让其他消费者可以消费;
2)消费者调用reserve获取job时,假如其监听的tube没有ready状态的job,那么客户端将会被阻塞,直到有job产生,或者阻塞超时;
//计算当前客户端待处理事件的deadlinestatic int64 conntickat(Conn *c)
{ //客户端正在阻塞
if (conn_waiting(c)) {
margin = SAFETY_MARGIN;
}
//如果客户端有reserved状态的任务,则获取到期时间最近的;(当客户端处于阻塞状态时,应该提前SAFETY_MARGIN时间处理此事件)
//connsoonestjob:获取到期时间最近的reserved job
if (has_reserved_job(c)) {
t = connsoonestjob(c)->r.deadline_at - nanoseconds() - margin;
should_timeout = 1;
} //客户端阻塞超时时间
if (c->pending_timeout >= 0) {
t = min(t, ((int64)c->pending_timeout) * 1000000000);
should_timeout = 1;
}
//返回时间发生的时间;后续会将此客户端插入srv->conns堆,且是按照此时间排序的;
if (should_timeout) { return nanoseconds() + t;
} return 0;
}问题3:当生产者新发布一个job到某个tube时,此时可能有其他消费者监听此tube,且阻塞等待job的产生,此时就需要将此job返回给消费者;处理函数为process_queue
static void process_queue()
{
int64 now = nanoseconds();
while ((j = next_eligible_job(now))) { //遍历所有tube,当tube有客户端等待,且有ready状态的job时,返回job
heapremove(&j->tube->ready, j->heap_index);
//ms_take:将客户端从此job所属tube的waiting集合中删除;并返回客户端conn
//remove_waiting_conn:从当前客户端conn监听的所有tube的waiting队列中移除自己
//reserve_job:返回此job给客户端
reserve_job(remove_waiting_conn(ms_take(&j->tube->waiting)), j);
}
}
static job next_eligible_job(int64 now)
{
tube t;
size_t i;
job j = NULL, candidate;
//循环所有tube
for (i = 0; i < tubes.used; i++) {
t = tubes.items[i]; if (t->pause) { //假如tube正在暂停,且超时时间未到,则跳过
if (t->deadline_at > now) continue; t->pause = 0;
} if (t->waiting.used && t->ready.len) { //tube的waiting集合有元素说明有客户端正在阻塞等待此tube产生任务;有ready状态的任务
candidate = t->ready.data[0]; //从tubes里获取满足条件的优先级最高得job返回
if (!j || job_pri_less(candidate, j)) {
j = candidate;
}
}
}
return j;
}
Conn * remove_waiting_conn(Conn *c)
{
tube t;
size_t i;
if (!conn_waiting(c)) return NULL;
c->type &= ~CONN_TYPE_WAITING; //去除CONN_TYPE_WAITING标志
global_stat.waiting_ct--; for (i = 0; i < c->watch.used; i++) { //遍历客户端监听的所有tube,挨个从tube的waiting队列中删除自己
t = c->watch.items[i]; t->stat.waiting_ct--; ms_remove(&t->waiting, c);
}
return c;
}
static void reserve_job(Conn *c, job j)
{ j->r.deadline_at = nanoseconds() + j->r.ttr; //job的实效时间
j->r.state = Reserved; //状态改为Reserved
job_insert(&c->reserved_jobs, j); //插入客户端的reserved_jobs链表
j->reserver = c; //记录job当前消费者
if (c->soonest_job && j->r.deadline_at < c->soonest_job->r.deadline_at) { //soonest_job记录最近要到期的Reserved状态的job,更新;
c->soonest_job = j;
}
return reply_job(c, j, MSG_RESERVED); //返回job}3.4.3 命令2——获取任务reserve
case OP_RESERVE_TIMEOUT:
timeout = strtol(c->cmd + CMD_RESERVE_TIMEOUT_LEN, &end_buf, 10); //reserve可以设置阻塞超时时间,解析
case OP_RESERVE:
op_ct[type]++;
connsetworker(c); //设置客户端类型为消费者CONN_TYPE_WORKER
//当客户端有多个任务正在处理,处于reserved状态,且超时时间即将到达时;如果此时客户端监听的所有tube都没有ready状态的任务,则直接返回MSG_DEADLINE_SOON给客户端
if (conndeadlinesoon(c) && !conn_ready(c)) { return reply_msg(c, MSG_DEADLINE_SOON);
}
//设置当前客户端正在等待job
wait_for_job(c, timeout);
//同3.4.2节
process_queue();上面说过,当客户端有多个任务正在处理,处于reserved状态,且超时时间即将到达时;
如果此时客户端监听的所有tube都没有ready状态的任务,则直接返回MSG_DEADLINE_SOON给客户端;
否则会导致客户端的阻塞,导致这些reserved的任务超时;
static void wait_for_job(Conn *c, int timeout)
{ c->state = STATE_WAIT; //设置客户端状态为STATE_WAIT
enqueue_waiting_conn(c); //将客户端添加到其监听的所有tube的waiting队列中
//设置客户端的超时时间
c->pending_timeout = timeout;
//修改关心的事件为可读事件
connwant(c, 'h'); c->next = dirty; //将当前客户端添加到dirty链表中
dirty = c;
}
static void enqueue_waiting_conn(Conn *c)
{
tube t;
size_t i;
global_stat.waiting_ct++; c->type |= CONN_TYPE_WAITING; for (i = 0; i < c->watch.used; i++) { //c->watch为客户端监听的所有tube t = c->watch.items[i]; t->stat.waiting_ct++; ms_append(&t->waiting, c); //t->waiting为等待当前tube有任务产生的所有客户端
}
}3.4.4 循环之始epoll_wait之前
在执行epoll_wait之前,需要计算超时时间;不能被epoll_wait一直阻塞;服务器还有很多事情待处理;
1)将状态未delay的且已经到期的job移到ready队列;
2)tube暂停时间到达,如果tube存在消费者阻塞等待获取job,需要返回job给客户端;
3)消费者消费的状态为reserved的job可能即将超时到期;
4)客户端阻塞等待job的超时时间可能即将达到;
服务器需要及时处理这些所有事情,因此epoll_wait等待时间不能过长;
int64 prottick(Server *s)
{
int64 period = 0x34630B8A000LL; //默认epoll_wait等待时间
now = nanoseconds(); while ((j = delay_q_peek())) { //遍历所有tube的delay队列中过期时间已经到达或者即将的job(即将到达时间最小)
d = j->r.deadline_at - now; if (d > 0) {
period = min(period, d); //即将到达,更新period
break;
}
j = delay_q_take();
r = enqueue_job(s, j, 0, 0); //job入队到ready队列
if (r < 1) bury_job(s, j, 0); /* out of memory, so bury it */
}
for (i = 0; i < tubes.used; i++) {
t = tubes.items[i]; d = t->deadline_at - now; if (t->pause && d <= 0) { //tube暂停期限达到,process_queue同3.4.2节
t->pause = 0;
process_queue();
} else if (d > 0) {
period = min(period, d); //tube暂停即将到期,更新period
}
}
while (s->conns.len) {
Conn *c = s->conns.data[0]; //循环获取conn待执行事件发生时间最早的
d = c->tickat - now; if (d > 0) { //发生事件未到,更新period,结束循环
period = min(period, d);
break;
}
heapremove(&s->conns, 0); //否则,移除conn,处理客户端事件
conn_timeout(c);
}
update_conns(); //更新客户端关心的socke事件,其实就是遍历dirty链表
return period;
}
static job delay_q_peek()
{
int i;
tube t;
job j = NULL, nj;
for (i = 0; i < tubes.used; i++) { //返回状态为delay且到期时间最小的job
t = tubes.items[i]; if (t->delay.len == 0) {
continue;
} nj = t->delay.data[0]; if (!j || nj->r.deadline_at < j->r.deadline_at) j = nj;
}
return j;
}
static void conn_timeout(Conn *c)
{
int r, should_timeout = 0;
job j;
//客户端正在被阻塞时,如果有reserved状态的job即将到期,则需要解除客户端阻塞
//conndeadlinesoon:查询到期时间最小的reserved job,校验其是否即将到期(1秒内到期)
if (conn_waiting(c) && conndeadlinesoon(c)) should_timeout = 1;
//connsoonestjob获取到期时间最近的reserved job
while ((j = connsoonestjob(c))) { if (j->r.deadline_at >= nanoseconds()) break;
timeout_ct++; //已经超时
j->r.timeout_ct++; r = enqueue_job(c->srv, remove_this_reserved_job(c, j), 0, 0); //从客户端的reserved_jobs链表移除job,重新入到tube的相应job队列
if (r < 1) bury_job(c->srv, j, 0); /* out of memory, so bury it */
connsched(c); //重新计算conn待处理事件的时间,入srv->conns堆
}
if (should_timeout) {
return reply_msg(remove_waiting_conn(c), MSG_DEADLINE_SOON); //reserved即将到期,解除阻塞,返回MSG_DEADLINE_SOON消息
} else if (conn_waiting(c) && c->pending_timeout >= 0) { //客户端阻塞超时,解除阻塞
c->pending_timeout = -1;
return reply_msg(remove_waiting_conn(c), MSG_TIMED_OUT);
}
}4、总结
本文主要介绍beanstalkd基本设计思路;从源码层次分析主要数据结构,服务器初始化过程,简要介绍了put和reserve两个命令执行过程;
beanstalkd其他的命令就不再介绍了,基本类似,感兴趣的可以自己研究。