

声明
本文章中所有内容仅供学习交流使用,不用于其他任何目的,不提供完整代码,抓包内容、敏感网址、数据接口等均已做脱敏处理,严禁用于商业用途和非法用途,否则由此产生的一切后果均与作者无关!
本文章未经许可禁止转载,禁止任何修改后二次传播,擅自使用本文讲解的技术而导致的任何意外,作者均不负责,若有侵权,请在公众号【K哥爬虫】联系作者立即删除!
前言
最近很多粉丝反馈,某验三代的滑块一直返回 forbidden,不知道为什么通过不了,尝试了很多方法都不行。其实是因为之前只校验了第三个 w 参数的值,现在官网加强了校验,前面两个 w 参数也需要逆出来,三个 w 参数相互关联,有一个不对,就无法通过验证。目前只发现官网做了更新,今后其他网站可能也会再上点强度。本文将会对每个 w 参数逐一逆向分析。
逆向目标
- 目标:最新某验 3 代滑块分析
- 网址:
aHR0cHM6Ly93d3cuZ2VldGVzdC5jb20vZGVtby8=
抓包分析
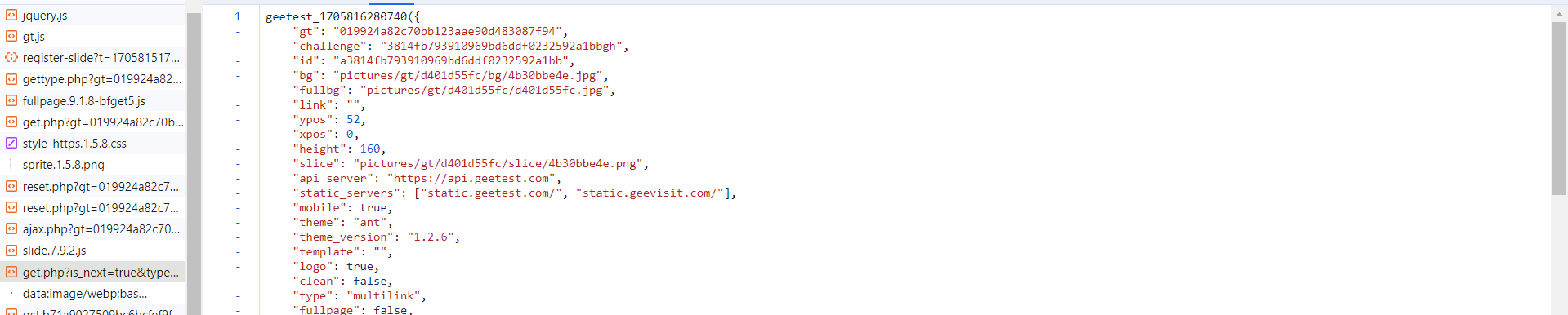
刷新页面,通过抓包发现, register-slide 接口会返回 challenge 和 gt 值,为接口 get.php 的主要请求参数:

get.php 接口会返回 c 和 s,后面会用到,新版界面此接口里的 w 不可以置空,旧版则可以置空:

点击按键验证,会弹出滑块窗口,同时抓到了一个 ajax.php 接口,这个接口会返回验证码的类型,虽然没用,但是如果不请求或者请求不带 w 后面都会报错。旧版的话这个接口也是必须请求,但是 w 也是可以置空,且后面不会报错:

紧着着,我们要又抓到一个 get.php 接口,这个接口仍然给我们返回 c 和 s,请求不一样的是,这个接口里面还给我们返回滑块图片以及底图:
紧接着,我们滑动完成拼图,得到验证结果 validate 参数,这个参数就是后续登录的令牌,在后续操作的请求中会用到:

逆向分析
第一个 w
从 get.php 接口处跟栈,或者直接搜 “\u0077” 即可成功定位,w=i+r:

关键代码如下:
var r = t[$_CEFDY(1196)]()
o = $_BEH()[$_CEFCV(1127)](fe[$_CEFDY(431)](t[$_CEFCV(370)]), t[$_CEFDY(1143)]()) i = R[$_CEFDY(1197)](o)
很明显,这几个参数对于我们都不陌生了,我们进入 l 参数,发现 this[$_CGHDO(1143)](e) 为 16 位随机字符串将 new G()[$_CGHDO(93)] 这个函数扣一下即可,这里很明显,构造了一个 G 函数,所以我们只需要把 G 函数扣一下即可: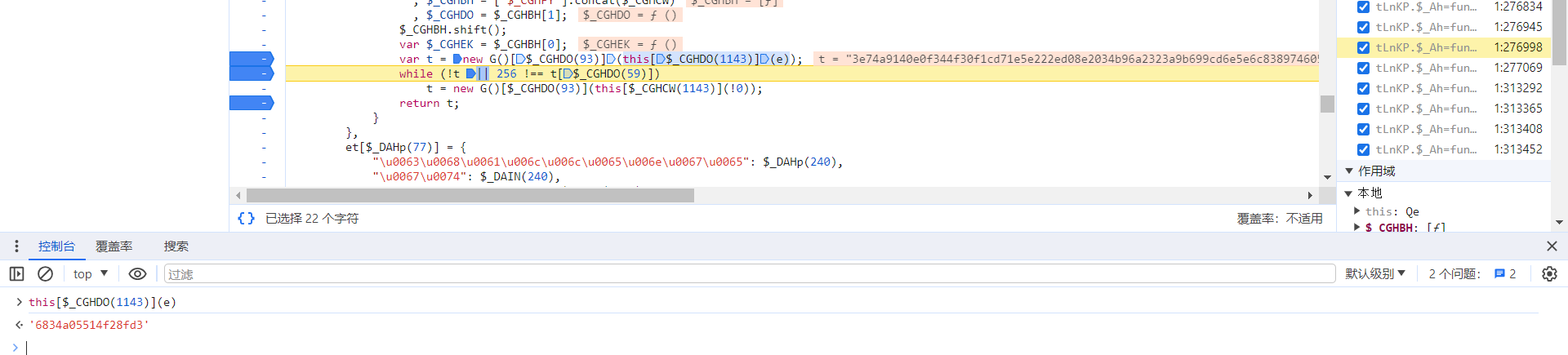
或者我们进入 G 的原型链 set_public 中,下断点,将他的 RSA 公钥和模值找到即可。所以 r 为 RSA 加密 16 位随机字符串。至此 r 值已经分析完毕。
接下来是 o 值,加密方法为 $_BEH()[$_CEFCV(1127)],传入参数为 t[$_CEFDY(1143)]() 和 fe[$_CEFDY(431)](t[$_CEFCV(370)])。我们发现 t[$_CEFDY(1143)]() 为 rsa 加密的 key,t[$_CEFDY(1143)]() 和 fe[$_CEFDY(431)](t[$_CEFCV(370)]) 为明文参数。进入加密方法,打断点调试,我们发现是 AES 加密,同时初始向量是 0000000000000000:


直接扣代码,或者引库复现即可:
function Aes_encrypt(text, key_value) {
var key = CryptoJS.enc.Utf8.parse(key_value);
var iv = CryptoJS.enc.Utf8.parse("0000000000000000");
var srcs = CryptoJS.enc.Utf8.parse(text);
var encrypted = CryptoJS.AES.encrypt(srcs, key, {
iv: iv,
mode: CryptoJS.mode.CBC,
padding: CryptoJS.pad.Pkcs7
});
for (var r = encrypted, o = r.ciphertext.words, i = r.ciphertext.sigBytes, s = [], a = 0; a < i; a++) {
var c = o[a >>> 2] >>> 24 - a % 4 * 8 & 255;
s.push(c);
}
return s;
}
现在,我们来分析一下明文的关键参数,这里我们采用 K 哥工具站,来解析一下,关键参数如下:
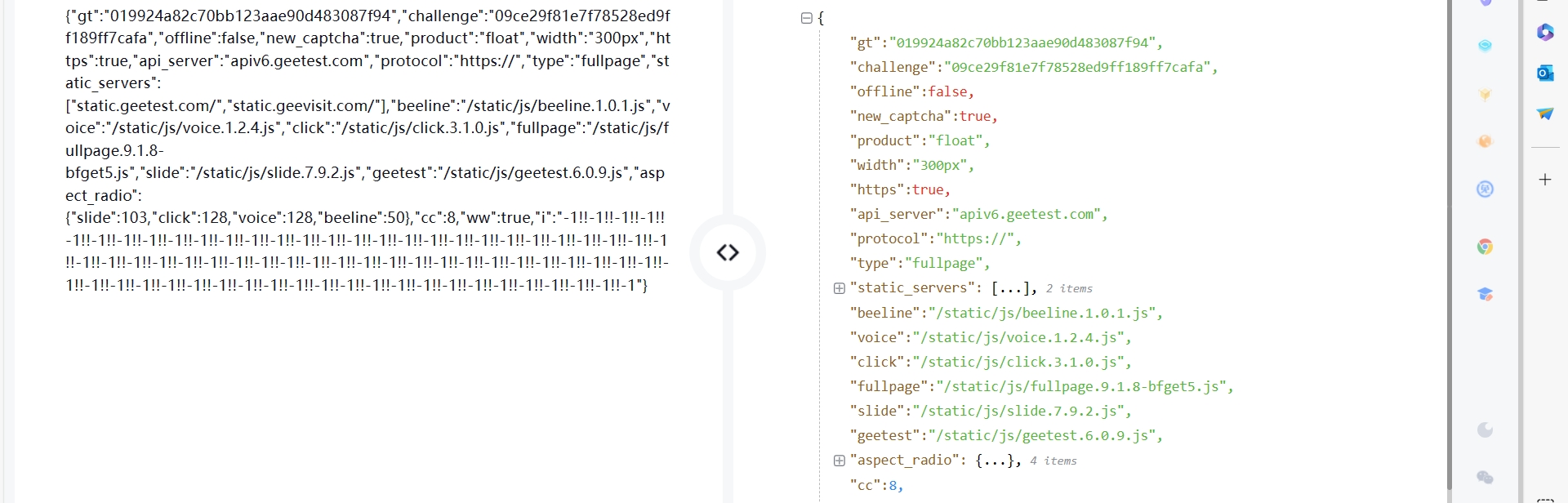
-
gt,challenge:第一个接口 /register-slider 返回;
-
offline, static_servers : static_servers 其他参数固定即可。
至此我们 o 就分析完毕,终于只剩下一个 i 值,接下来我们分析一下 i 值,我们进入 R[$_CEFDY(1197)] 函 数,发现 i 值为 t 中的俩个 value 值相加,t 的定义在断点上方:

传入的参数 e 为我们上一个步骤 aes 加密后的值,跟进到 this[$_IJDN(480)] 中,我们发现他属于 m 模块下的函数:
将整个 m 扣下来,复现如下:
小结:第一个 w 和以前扣法基本一致,只是明文上有参差之分。
第二个 w
目前,我们第一个接口已经完成,拿到了返回的 s 和 c,接下来我们进入 ajax.php 接口,还是跟栈进入。
我们依然搜索定位参数"\u0077" ,发现并没有搜到,所以这个 w 和我们以前的扣法有点不一样!!!不过通过,跟栈的方式,我们找到正确位置。位置的话在 var n = {}; 这个地方,我们下断点:
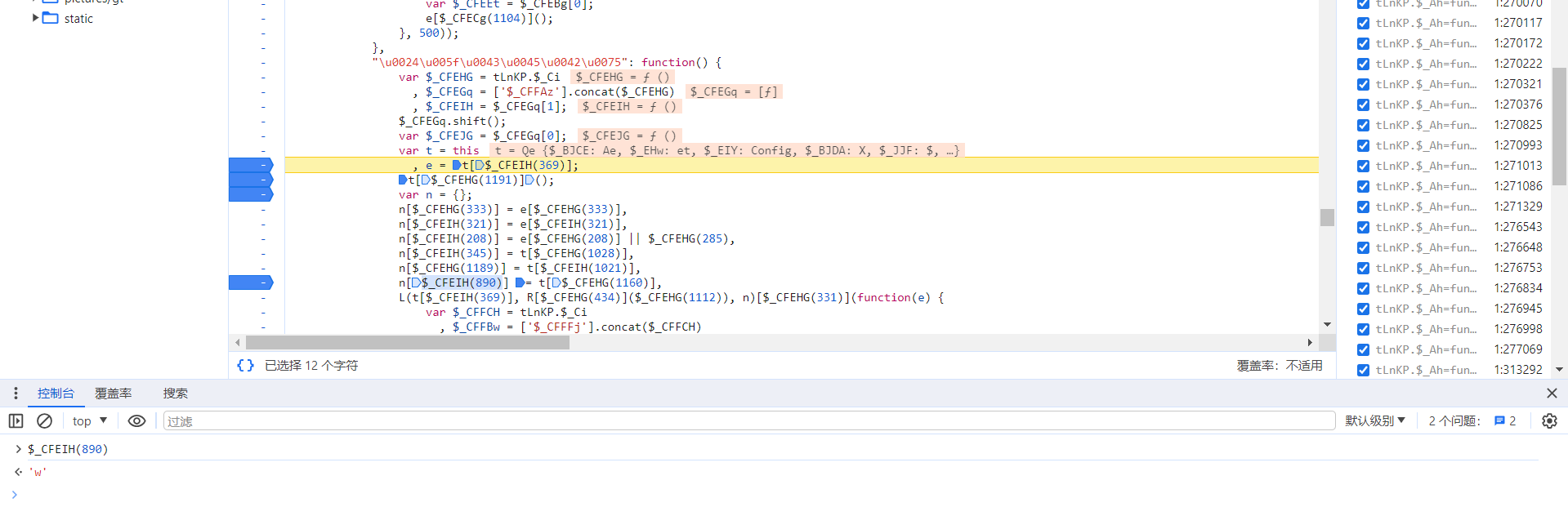
w 值就是 t[$_CFEHG(1160)],前面我们发现 var t=this,然后经过 t[$_CFEHG(1191)](),我们的 w 值就生成了。我们进入这个函数之中,进入以后发现异常的熟悉,这不就是无感系列的 w 吗?
当然如果你是第一次扣,也不要心急,我们找到 w 定位的地方:
i[$_CFHIs(1160)] = R[$_CFHIs(1197)](c[$_CFHIs(93)](r, i[$_CFHIs(1143)]()))
我们简单修改一下代码,大概如下 w=R["encrypt"](r,key),没错这个 R 方法其实与第一个 w 中 i 生成方式一样。所以现在,我们只需要解决 r 参数就可以完成第二个 w 的逆向。我们看一下 r 参数包括那些,我们依旧使用 K 哥工具站进行解析:

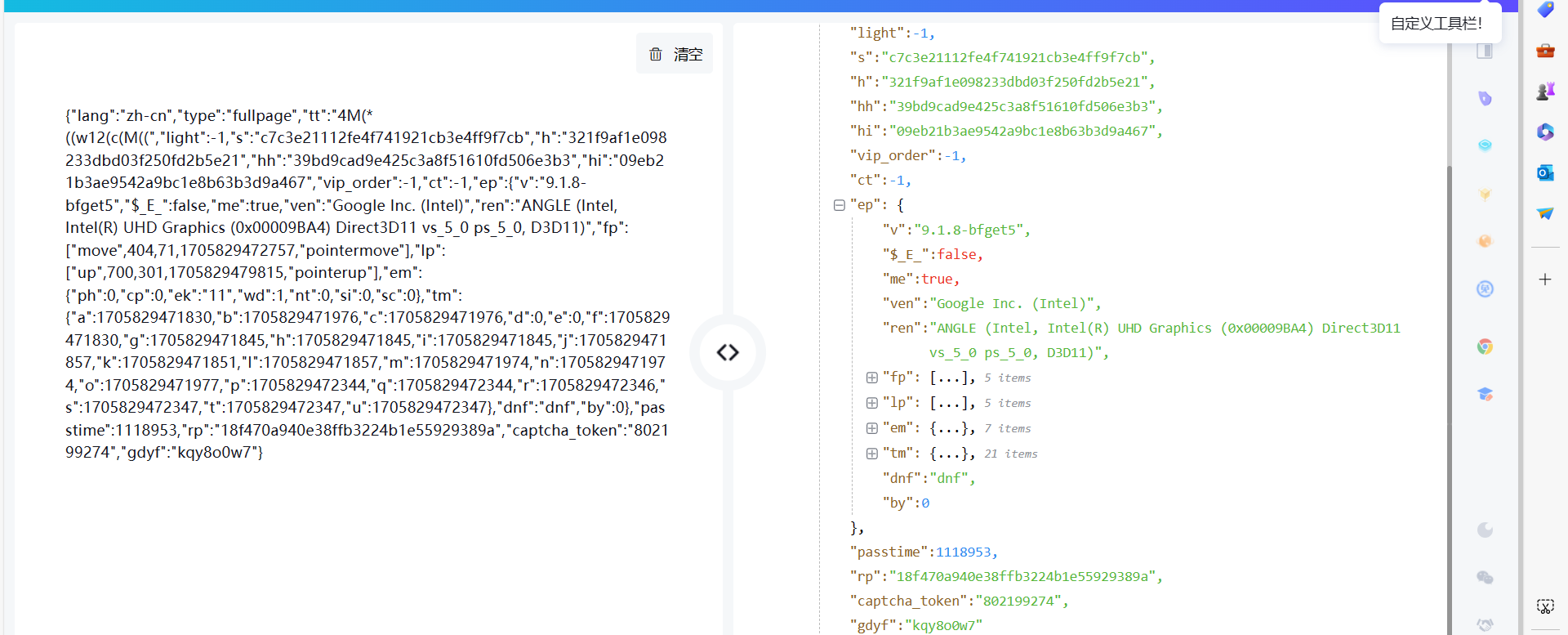
nr = {
"lang": "zh-cn",
"type": "fullpage",
"tt": "M3*8Pjp8Pj9HbUp8PN9U),,:A(,(5(,(m-BJBFB:bgfA9/1O6*:I:JkNjRj31RkK**2KDRjE1S0OMM9*)-2.k6h)).E-:-)-9-:(:5b9-:1Mal2UK1RjY1I****)*:F3)pM0/JBBBA(((((,((iB9(((((,(5bn)BBBo95(,(qcjc*)R)fM2*QWU3cUA.N9?-G5N(:(?-N6,B1-2OUS_M9b?M:(A-)19d_cUS/BTF@AfC*Mf5?M95U-)1E1*OE(mj@.NQJ2@(g5@Acb?T)0N5u9khbE6,:CX)*E/B5-*Mb*)ME-((((M(((((((Lqqqp(Df((((((bb55,55(5((,((n-.(--88e(qR@).?2WE-Q(c19M9-)M919/)MM/)(P-U-(/)M*/.M*-)4)M@-N9d5Y-,-d(?b9/,M1AB9*nF)2(J*Df*M9/)MfN9*)(UU(0)(N1I-*b9/)(0qqM)qqp(-n",
"light": "SPAN_0",
"s": "c7c3e21112fe4f741921cb3e4ff9f7cb",
"h": "321f9af1e098233dbd03f250fd2b5e21",
"hh": "39bd9cad9e425c3a8f51610fd506e3b3",
"hi": "09eb21b3ae9542a9bc1e8b63b3d9a467",
"vip_order": -1,
"ct": -1,
"ep": {
"v": "9.1.8-bfget5",
"$_E_": false,
"me": true,
"ven": "Google Inc. (Intel)",
"ren": "ANGLE (Intel, Intel(R) HD Graphics 520 Direct3D11 vs_5_0 ps_5_0, D3D11)",
"fp": ["move", 483, 149, 1702019849214, "pointermove"],
"lp": ["up", 657, 100, 1702019852230, "pointerup"],
"em": {"ph": 0, "cp": 0, "ek": "11", "wd": 1, "nt": 0, "si": 0, "sc": 0},
"tm": {
"a": 1702019845759,
"b": 1702019845951,
"c": 1702019845951,
"d": 0,
"e": 0,
"f": 1702019845763,
"g": 1702019845785,
"h": 1702019845785,
"i": 1702019845785,
"j": 1702019845845,
"k": 1702019845812,
"l": 1702019845845,
"m": 1702019845942,
"n": 1702019845946,
"o": 1702019845954,
"p": 1702019846282,
"q": 1702019846282,
"r": 1702019846287,
"s": 1702019846288,
"t": 1702019846288,
"u": 1702019846288
},
"dnf": "dnf",
"by": 0
},
"passtime": 5365,
"rp": "0d51406b2c658811294a91e9ea533bed",
"captcha_token": "541381339",
"gdyf": "kqy8o0w7"
}
很明显,这里面有很多参数,一眼看起来很多参数像 md5 加密,我们向上调试进行分析,就可以找到参数定义的地方。这里的 e,t,n,t 是浏览器环境的计算以及一些鼠标的移动轨迹,实测这 4 个值固定或者随机生成即可,再往下走会遇到给变量去赋值的情况,这里的 V 就是 md5 方法:

这里主要说一下 rp 参数以及 tt 参数是怎么生成的,其他参数可以固定,向上观察,找到明显的+号地方,我们发现 rp 参数是这样定义的:

直接引库复现即可:
const CryptoJS = require("crypto-js");
let gtt = '019924a82c70bb123aae90d483087f94';
let challenge = '7d59427b8c64734df3d8aa8585311fac';
let rp = CryptoJS.MD5(gtt + challenge + 1986).toString();
至此,我们的 nr 分析到此结束,第二个 w 复现如下:
nr = {"自行生成"};
# nr 如上,ot 为上一个 w 的 key,保持一致!
w2 = R['$_HDZ'](c['encrypt'](fe['stringify'](nr), Ot));
第三个 w
最后一个 w 大伙都很熟悉了, 没有研究过的可以阅读下这篇文章 【验证码逆向专栏】某验三代滑块验证码逆向分析,讲解的更为详细,本文简单分析一下。
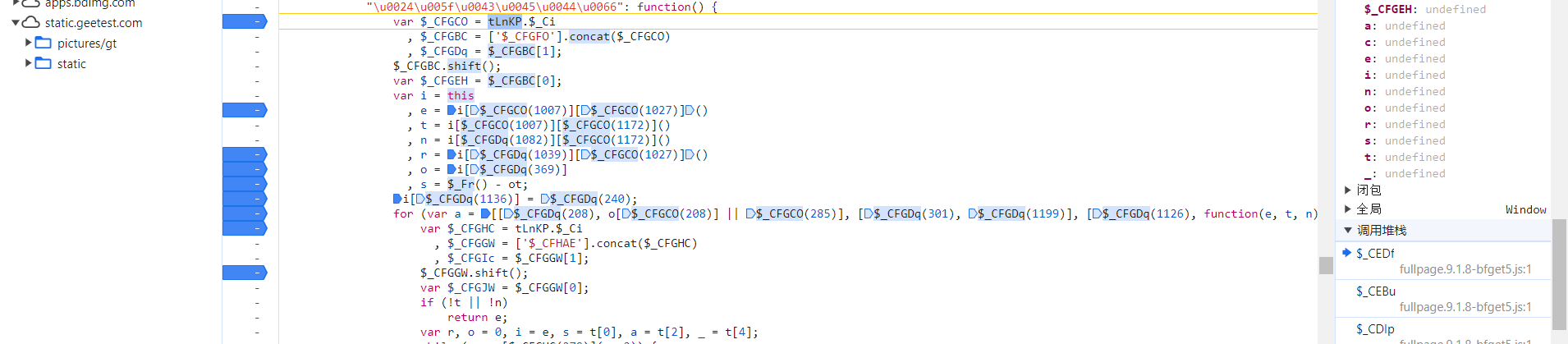
走到这里,我们已经成功百分之 80 了,我们依旧从栈的入口进入,搜索关键参数"\u0077" ,果然,峰回路转,又回到了这里:

明显,这个和我们第一个 w 生成的方式是一模一样的:
u = r[$_CAHJS(737)]()
l = V[$_CAHJS(392)](gt[$_CAIAK(254)](o), r[$_CAIAK(744)]())
h = m[$_CAIAK(792)](l)
w = h + u
可以直接按第一个 w 的方法直接引库,或者直接扣下整个模块即可。
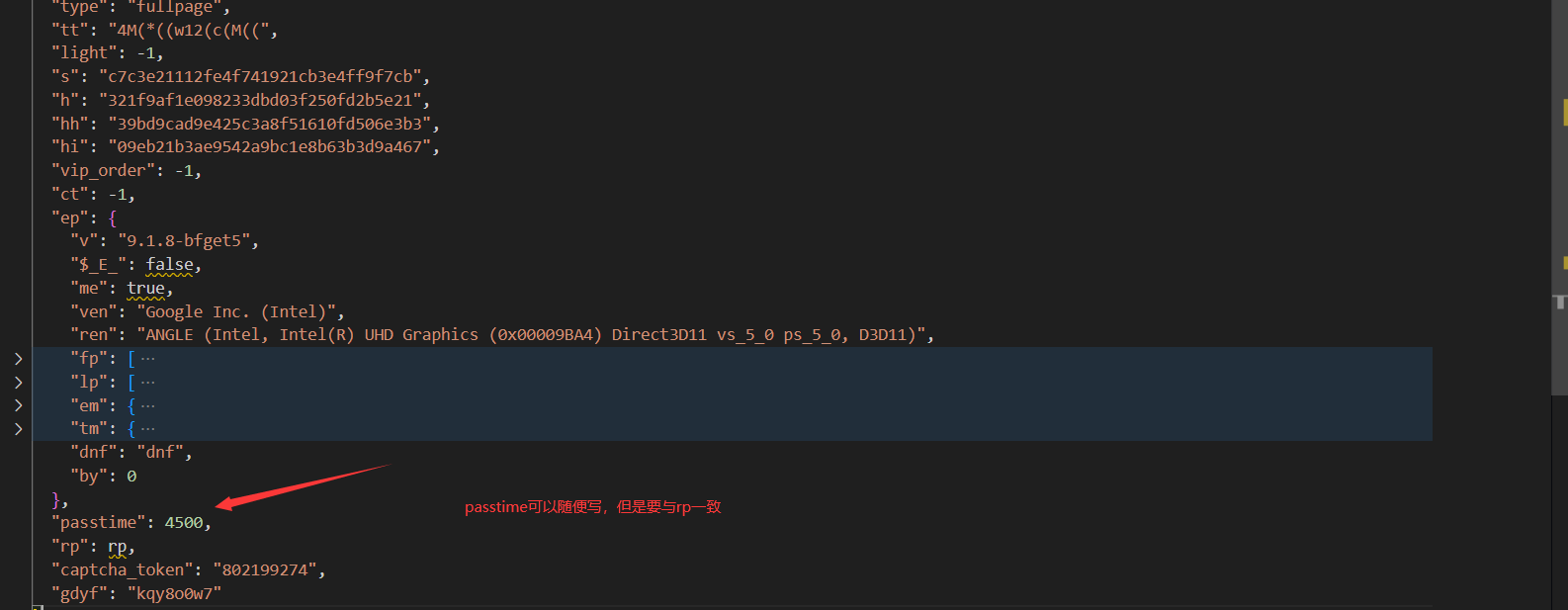
这里,我们打印 o 参数,看看 o 参数中哪些是固定不变的,哪些是动态变化的:

- userresponse:滑动距离 + challenge 的值;
- passtime:滑块滑动时间;
- imgload:图片加载时间;
- aa:轨迹加密;
- h9s9:每天 key、value 会变,固定即可;
rp:gt + 32 位 challenge + passtime,再经过 MD5 加密。
发现这里有我们上面扣过的 rp,我们直接用上面的代码复现即可,不懂观察的,无脑去扣,只会影响我们拔刀的速度:
var CryptoJS = require("crypto-js");
gt = '019924a82c70bb123aae90d483087f94'
challenge = '7d59427b8c64734df3d8aa8585311fac'
var rp = CryptoJS.MD5(gtt + challenge + 476).toString()
再往上,我们就可以看到 userresponse 与 aa 参数定义的部分:
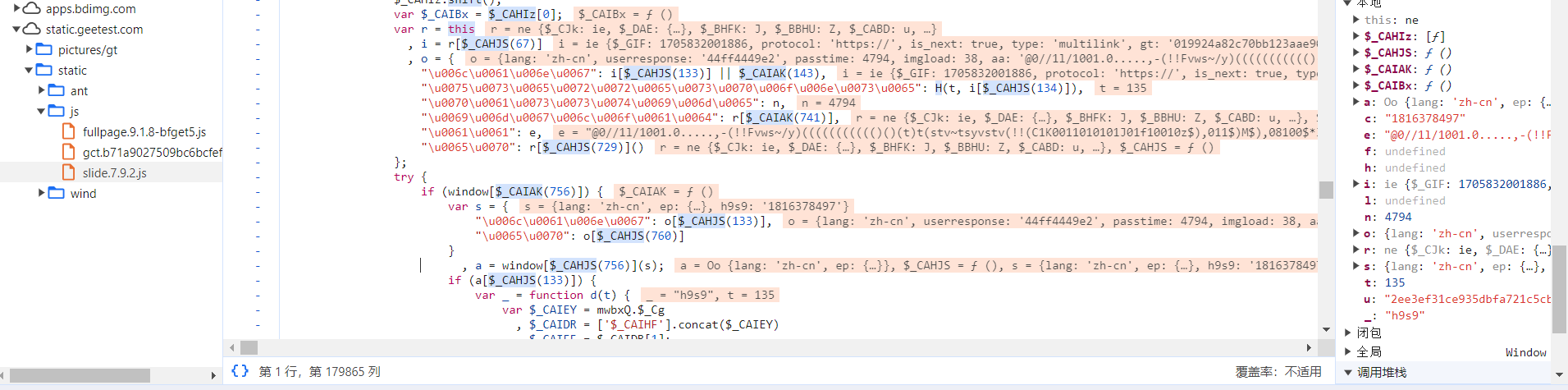
// t 为滑动距离,i[$_CAHJS(134)] 为最新的 challenge
var userresponse = H(t, i[$_CAHJS(134)])
进入 H 函数,将 H 函数扣下来即可:
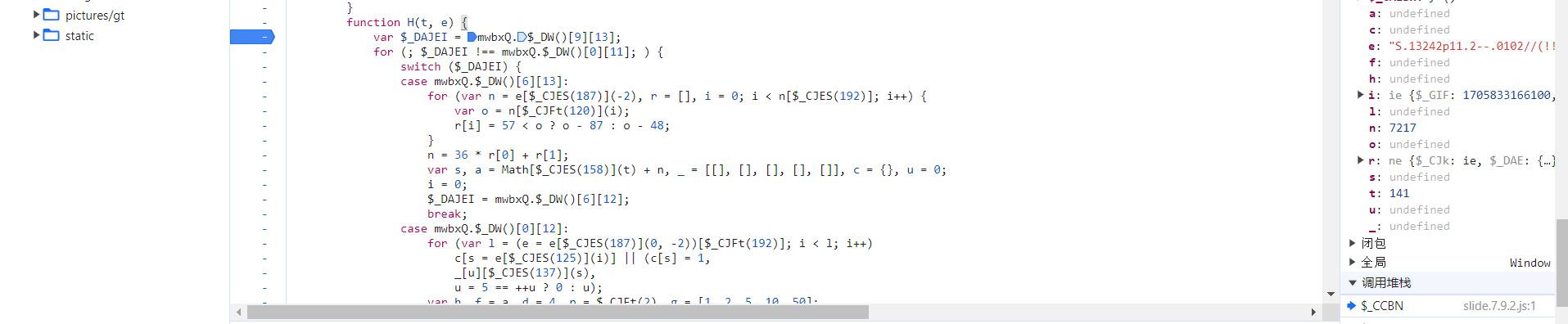
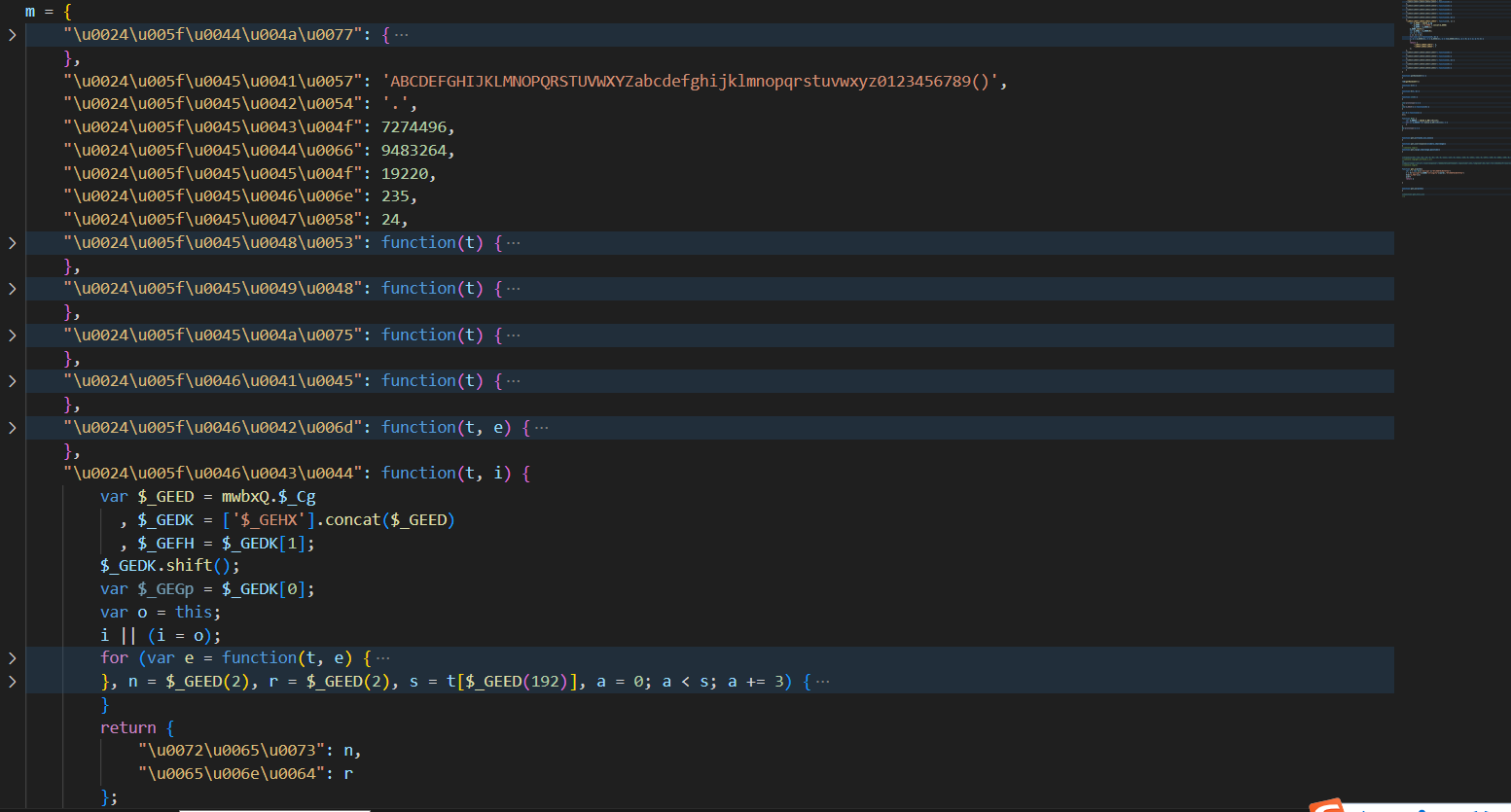
会提示 mwbxQ 不存在,我们把代码放入 nodepad 中,折叠代码:

发现,这个函数在开头就定义,我们把他扣一下即可,即可成功完成 H 的工作,自然这个 userresponse 也就不成问题了。
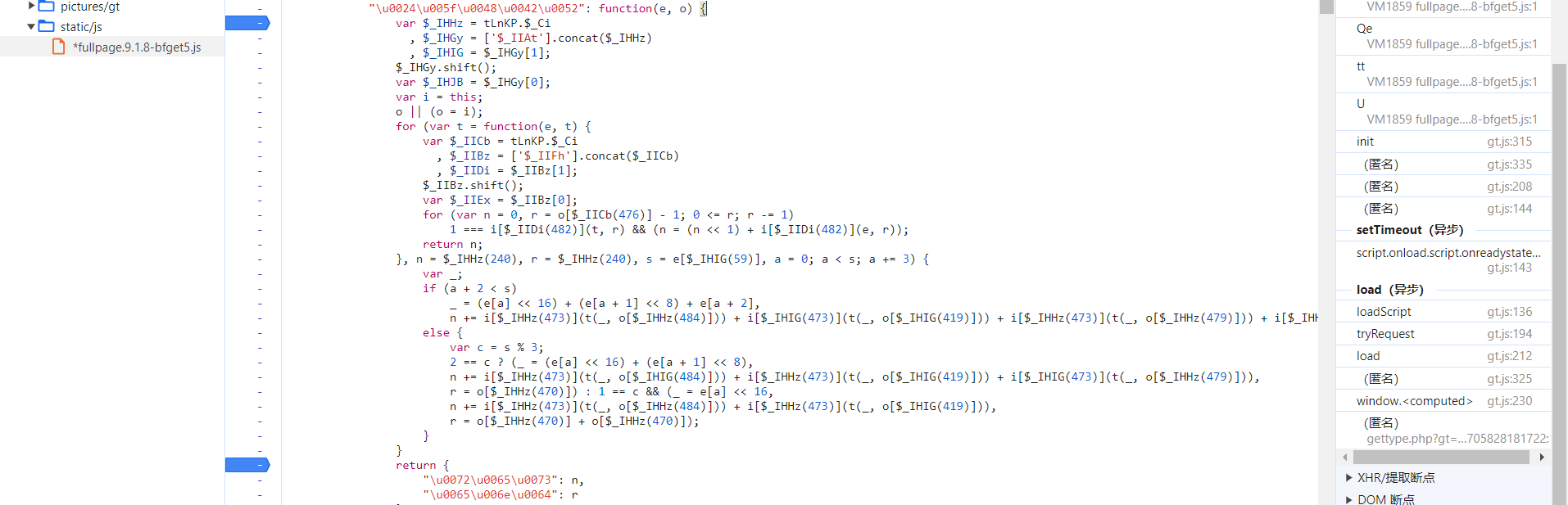
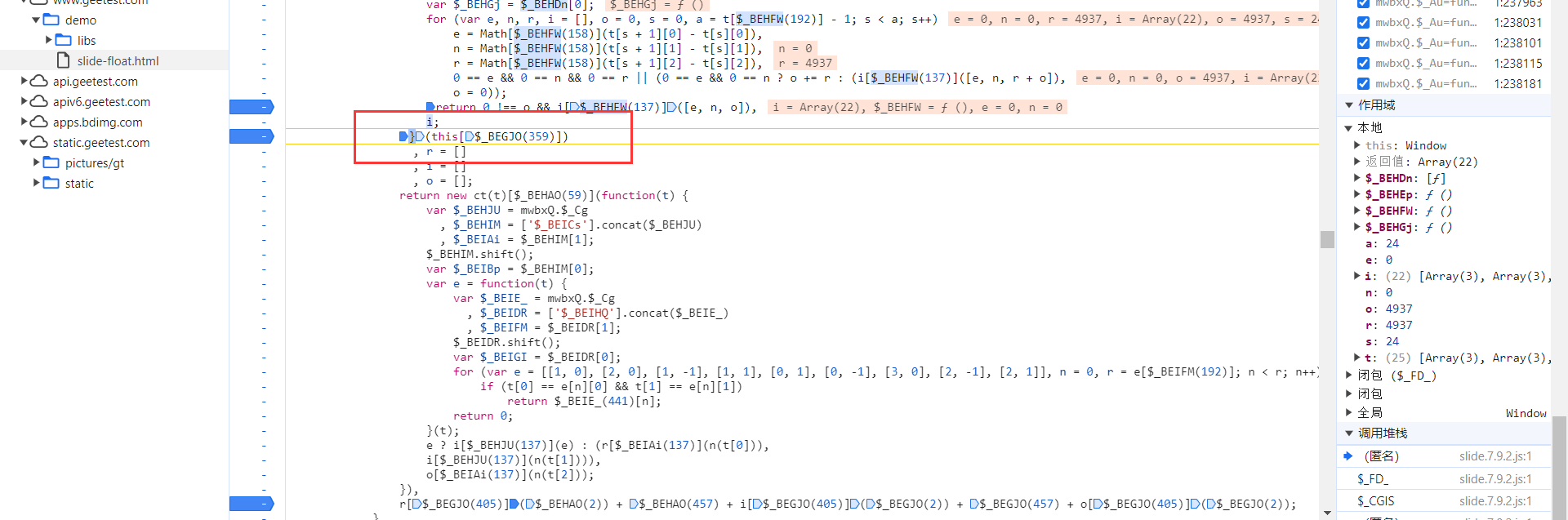
接下来我们分析 aa,我们看到 aa 参数是由 e 定义的,e 是由上一个函数传过来的,所以我们跟栈,找到 e 定义的地方:
l = n[$_DAAAU(985)][$_CJJJU(1075)](n[$_CJJJU(985)][$_CJJJU(1073)](), n[$_CJJJU(67)][$_CJJJU(1033)], n[$_DAAAU(67)][$_CJJJU(345)]);

$_CJJJU(1075)](n[$_CJJJU(985)][$_CJJJU(1073)]() 为轨迹加密结果,n[$_CJJJU(67)][$_CJJJU(1033)] 为 c 值,n[$_DAAAU(67)][$_CJJJU(345)]) 为 s 值。我们进入 $_CJJJU(1075)](n[$_CJJJU(985)][$_CJJJU(1073)] 中,找到轨迹加密的地方。我们发现 this[$_BEGJO(359)] 为轨迹数组:
我们将整个函数扣下来,将函数改写,将轨迹当参数传到里面,改写如下,缺什么补什么,最快速的办法,就是利用 nodepad 折叠,可以直观的看到函数分布情况,将可以看到的有用的放进去,然后运行,缺什么补什么即可。附上部分代码:
function ct(t) {
........................................................................
此处省略,具体缺什么取扣什么,补进来就行
W['prototype'] = {
"\u0024\u005f\u0046\u0044\u004c": function (trace) {
var $_BEGJp = _tkts.$_Ch
, $_BEGIy = ['$_BEHCk'].concat($_BEGJp)
, $_BEHAJ = $_BEGIy[1];
$_BEGIy.shift();
var $_BEHBv = $_BEGIy[0];
function n(t) {
var $_DBEA_ = _tkts.$_Dm()[0][10];
for (; $_DBEA_ !== _tkts.$_Dm()[0][9];) {
switch ($_DBEA_) {
case _tkts.$_Dm()[4][10]:
var e = $_BEGJp(454)
, n = e[$_BEGJp(159)]
, r = $_BEHAJ(82)
, i = Math[$_BEHAJ(310)](t)
, o = parseInt(i / n);
n <= o && (o = n - 1),
o && (r = e[$_BEGJp(176)](o));
var s = $_BEGJp(82);
return t < 0 && (s += $_BEGJp(413)),
r && (s += $_BEHAJ(445)),
s + r + e[$_BEGJp(176)](i %= n);
break;
}
}
}
}
aa = W['prototype']['\u0024\u005f\u0042\u0042\u0045\u0049'](W['prototype']['\u0024\u005f\u0046\u0044\u004c'](trace), C, S);
console.log(aa)
```
至此,aa 参数分析完毕,至此第三个 w 参数分析完毕,结束了嘛?并没有~
底图还原
def restore_picture():
img_list = ["./乱序缺口背景图.png", "./乱序背景图.png"]
for index, img in enumerate(img_list):
image = Image.open(img)
s = Image.new("RGBA", (260, 160))
ut = [39, 38, 48, 49, 41, 40, 46, 47, 35, 34, 50, 51, 33, 32, 28, 29, 27, 26, 36, 37, 31, 30, 44, 45, 43, 42,
12, 13, 23, 22, 14, 15, 21, 20, 8, 9, 25, 24, 6, 7, 3, 2, 0, 1, 11, 10, 4, 5, 19, 18, 16, 17]
height_half = 80
for inx in range(52):
c = ut[inx] % 26 * 12 + 1
u = height_half if ut[inx] > 25 else 0
l_ = image.crop(box=(c, u, c + 10, u + 80))
s.paste(l_, box=(inx % 26 * 10, 80 if inx > 25 else 0))
if index == 0:
s.save("./缺口背景图片.png")
else:
s.save("./背景图片.png")
restore_picture()
识别缺口
这里分为 A 方案和 B 方案:
A 方案
import io
from PIL import Image
import cv2
import numpy as np
# 将 Image 转换为 Mat,通过 flag 可以控制颜色
def pilImgToCv2(img: Image.Image, flag=cv2.COLOR_RGB2BGR):
return cv2.cvtColor(np.asarray(img), flag)
# 弹窗查看图片
def showImg(bg: cv2.Mat, name='test', delay=0):
cv2.imshow(name, bg)
cv2.waitKey(delay)
cv2.destroyAllWindows()
def getDistance(img: Image.Image, slice: Image.Image):
# 通过 pilImgToCv2 将图片置灰
# 背景图和滑块图都需要做相同处理
grayImg = pilImgToCv2(img, cv2.COLOR_BGR2GRAY)
# showImg(grayImg) # 可以通过它来看处理后的图片效果
graySlice = pilImgToCv2(slice, cv2.COLOR_BGR2GRAY)
# 做边缘检测进一步降低干扰,阈值可以自行调整
grayImg = cv2.Canny(grayImg, 255, 255)
# showImg(grayImg) # 可以通过它来看处理后的图片效果
graySlice = cv2.Canny(graySlice, 255, 255)
# 通过模板匹配两张图片,找出缺口的位置
result = cv2.matchTemplate(grayImg, graySlice, cv2.TM_CCOEFF_NORMED)
maxLoc = cv2.minMaxLoc(result)[3]
# 匹配出来的滑动距离
distance = maxLoc[0]
# 下面的逻辑是在图片画出一个矩形框来标记匹配到的位置,可以直观的看到匹配结果,去掉也可以的
sliceHeight, sliceWidth = graySlice.shape[:2]
# 左上角
x, y = maxLoc
# 右下角
x2, y2 = x + sliceWidth, y + sliceHeight
resultBg = pilImgToCv2(img, cv2.COLOR_RGB2BGR)
cv2.rectangle(resultBg, (x, y), (x2, y2), (0, 0, 255), 2)
# showImg(resultBg),可以通过它来看处理后的图片效果
print(distance)
return distance, resultBg
sliceimgpath = './slice.png'
imgpath = './缺口背景图片.png'
getDistance(Image.open(imgpath), Image.open(sliceimgpath))
B 方案
slide = ddddocr.DdddOcr(det=False, ocr=False)
with open('bg.jpg', 'rb') as f:
target_bytes = f.read()
with open('fullpage.jpg', 'rb') as f:
background_bytes = f.read()
img = cv2.imread("bg.jpg")
res = slide.slide_comparison(target_bytes, background_bytes)
print(res)
轨迹模拟
import random
def __ease_out_expo(sep):
'''
轨迹相关操作
'''
if sep == 1:
return 1
else:
return 1 - pow(2, -10 * sep)
def get_slide_track(distance):
"""
根据滑动距离生成滑动轨迹
:param distance: 需要滑动的距离
:return: 滑动轨迹<type 'list'>: [[x,y,t], ...]
x: 已滑动的横向距离
y: 已滑动的纵向距离, 除起点外, 均为0
t: 滑动过程消耗的时间, 单位: 毫秒
"""
if not isinstance(distance, int) or distance < 0:
raise ValueError(f"distance类型必须是大于等于0的整数: distance: {distance}, type: {type(distance)}")
# 初始化轨迹列表
slide_track = [
[random.randint(-50, -10), random.randint(-50, -10), 0],
[0, 0, 0],
]
# 共记录count次滑块位置信息
count = 40 + int(distance / 2)
# 初始化滑动时间
t = random.randint(50, 100)
# 记录上一次滑动的距离
_x = 0
_y = 0
for i in range(count):
# 已滑动的横向距离
x = round(__ease_out_expo(i / count) * distance)
# y = round(__ease_out_expo(i / count) * 14)
# 滑动过程消耗的时间
t += random.randint(10, 50)
if x == _x:
continue
slide_track.append([x, _y, t])
_x = x
slide_track.append(slide_track[-1])
return slide_track
结果验证





