
大家好,欢迎来到小彭的 LeetCode 周赛解题报告。
昨晚是 LeetCode 双周赛第 102 场,你参加了吗?这场比赛比较简单,拼的是板子手速,继上周掉大分后算是回了一口血 😁。
2618. 查询网格图中每一列的宽度(Easy)
简单模拟题,无需解释。
- 模拟:O(nm)O(nm)O(nm)
2619. 一个数组所有前缀的分数(Medium)
简单动态规划题,简单到像模拟题。
- 动态规划:O(n)O(n)O(n)
2620. 二叉树的堂兄弟节点 II(Medium)
思考过程:递归→DFS→BFS。由于堂兄弟节点都在同一层,发现 “递归地减少问题规模求解原问题” 和 DFS 都不好编码,而 BFS 更符合 “层” 的概念。往 BFS 方向思考后,容易找到解决方法。
- BFS:O(n)O(n)O(n)
2621. 设计可以求最短路径的图类(Hard)
最近周赛的最短路问题非常多,印象中已经连续出现三次最短路问题。理解 Dijkstra 算法和 Floyd 算法的应用场景非常重要。
- 朴素 Dijkstra:KaTeX parse error: Expected 'EOF', got '·' at position 10: O(m + q_1·̲n^2 + q_2)
- Dijkstra + 最小堆:KaTeX parse error: Expected 'EOF', got '·' at position 10: O(m + q_1·̲nlgm+q_2)
- Floyd:KaTeX parse error: Expected 'EOF', got '·' at position 22: …n^3 + q_1 + q_2·̲n^2)


2618. 查询网格图中每一列的宽度(Easy)
题目地址
题目描述
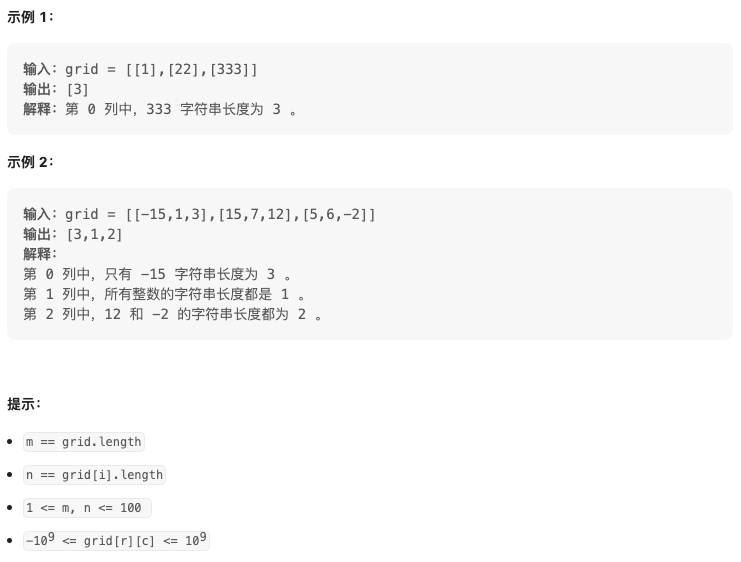
给你一个下标从 0 开始的 m x n 整数矩阵 grid 。矩阵中某一列的宽度是这一列数字的最大 字符串长度 。
- 比方说,如果
grid = [[-10], [3], [12]],那么唯一一列的宽度是3,因为10的字符串长度为3。
请你返回一个大小为 n 的整数数组 ans ,其中 ans[i] 是第 i 列的宽度。
一个有 len 个数位的整数 x ,如果是非负数,那么 字符串长度 为 len ,否则为 len + 1 。
题解(模拟)
class Solution {
fun findColumnWidth(grid: Array<IntArray>): IntArray {
val m = grid.size
val n = grid[0].size
val ret = IntArray(n)
for (column in 0 until n) {
for (row in 0 until m) {
ret[column] = Math.max(ret[column], "${grid[row][column]}".length)
}
}
return ret
}
}
复杂度分析:
- 时间复杂度:O(nm)O(nm)O(nm) 其中 nnn 和 mmm 为 grid 数组的行列大小,每个节点最多访问 1 次;
- 空间复杂度:O(1)O(1)O(1) 不考虑结果数组。
2619. 一个数组所有前缀的分数(Medium)
题目地址
题目描述
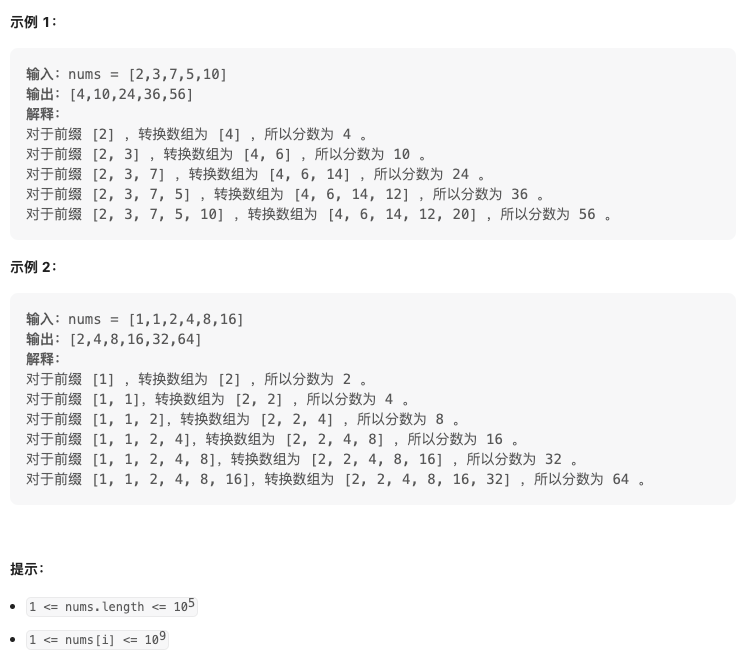
定义一个数组 arr 的 转换数组 conver 为:
conver[i] = arr[i] + max(arr[0..i]),其中max(arr[0..i])是满足0 <= j <= i的所有arr[j]中的最大值。
定义一个数组 arr 的 分数 为 arr 转换数组中所有元素的和。
给你一个下标从 0 开始长度为 n 的整数数组 nums ,请你返回一个长度为 n 的数组 **ans ,其中 ans[i]是前缀 nums[0..i] 的分数。
题解(动态规划)
简单动态规划题,容易发现递归关系:
- conver[i] = max{maxNum, arr[i]}
- dp[i] = dp[i-1] + conver[i]
class Solution {
fun findPrefixScore(nums: IntArray): LongArray {
val n = nums.size
val ret = LongArray(n)
// 初始状态
ret[0] = 2L * nums[0]
var maxNum = nums[0]
// DP
for (i in 1 until n) {
maxNum = Math.max(maxNum, nums[i])
ret[i] = ret[i - 1] + (0L + nums[i] + maxNum)
}
return ret
}
}
复杂度分析:
- 时间复杂度:O(n)O(n)O(n) 其中 nnn 为 arrarrarr 数组的长度,每个节点最多访问 1 次;
- 空间复杂度:O(1)O(1)O(1) 不考虑结果数组。
2620. 二叉树的堂兄弟节点 II(Medium)
题目地址
题目描述
给你一棵二叉树的根 root ,请你将每个节点的值替换成该节点的所有 堂兄弟节点值的和 。
如果两个节点在树中有相同的深度且它们的父节点不同,那么它们互为 堂兄弟 。
请你返回修改值之后,树的根 **root **。
注意,一个节点的深度指的是从树根节点到这个节点经过的边数。

题解(BFS)
分析 1 - 递归:尝试分解左右子树求解问题,发现左右子树不独立,不再考虑此思路;
分析 2 - DFS / BFS:由于堂兄弟节点都在同一层,而 BFS 更符合 “层” 的概念,往 BFS 方向思考后,容易找到解决方法:在处理每一层的节点时,第一轮遍历先累计下一层节点的和,在第二轮遍历时更新下一层节点(取出自己和兄弟节点的值)。
/**
* Example:
* var ti = TreeNode(5)
* var v = ti.`val`
* Definition for a binary tree node.
* class TreeNode(var `val`: Int) {
* var left: TreeNode? = null
* var right: TreeNode? = null
* }
*/
class Solution {
fun replaceValueInTree(root: TreeNode?): TreeNode? {
if (null == root) return root
// BFS
val queue = LinkedList<TreeNode>()
queue.offer(root)
root.`val` = 0
while (!queue.isEmpty()) {
val size = queue.size
// 计算下一层的和
var nextLevelSum = 0
for (i in 0 until size) {
val node = queue[i]
if (null != node.left) nextLevelSum += node.left.`val`
if (null != node.right) nextLevelSum += node.right.`val`
}
for (count in 0 until size) {
val node = queue.poll()
// 减去非堂兄弟节点
var nextLevelSumWithoutNode = nextLevelSum
if (null != node.left) nextLevelSumWithoutNode -= node.left.`val`
if (null != node.right) nextLevelSumWithoutNode -= node.right.`val`
// 入队
if (null != node.left) {
queue.offer(node.left)
node.left.`val` = nextLevelSumWithoutNode
}
if (null != node.right) {
queue.offer(node.right)
node.right.`val` = nextLevelSumWithoutNode
}
}
}
return root
}
}
复杂度分析:
- 时间复杂度:O(n)O(n)O(n) 其中 n 为二叉树的节点总数,每个节点最多访问 2 次(含入队 1 次);
- 空间复杂度:O(n)O(n)O(n) BFS 队列空间。
相似题目:
2621. 设计可以求最短路径的图类(Hard)
题目地址
题目描述
给你一个有 n 个节点的 有向带权 图,节点编号为 0 到 n - 1 。图中的初始边用数组 edges 表示,其中 edges[i] = [fromi, toi, edgeCosti] 表示从 fromi 到 toi 有一条代价为 edgeCosti 的边。
请你实现一个 Graph 类:
Graph(int n, int[][] edges)初始化图有n个节点,并输入初始边。addEdge(int[] edge)向边集中添加一条边,其中 ****edge = [from, to, edgeCost]。数据保证添加这条边之前对应的两个节点之间没有有向边。int shortestPath(int node1, int node2)返回从节点node1到node2的路径 最小 代价。如果路径不存在,返回1。一条路径的代价是路径中所有边代价之和。

问题分析
这道题勉强能算 Floyd 算法或 Dijkstra 算法的模板题,先回顾一下最短路问题解决方案:
- Dijkstra 算法(单源正权最短路):
- 本质上是贪心 + BFS;
- 负权边会破坏贪心策略的选择,无法处理含负权问题;
- 稀疏图小顶堆的写法更优,稠密图朴素写法更优。
- Floyd 算法(多源汇正权最短路)
- Bellman Ford 算法(单源负权最短路)
- SPFA 算法(单源负权最短路)
由于这道题需要支持多次查询操作,而 Floyd 算法能够缓存最短路结果,理论上 Floyd 算法是更优的选择。不过,我们观察到题目的数据量非常非常小,所以朴素 Dijkstra 算法也能通过。
题解一(朴素 Dijkstra)
这道题的查询操作是求从一个源点到目标点的最短路径,并且这条路径上没有负权值,符合 Dijkstra 算法的应用场景,在处理添加边时,只需要动态的修改图数据结构。
Dijkstra 算法的本质是贪心 + BFS,我们需要将所有节点分为 2 类,在每一轮迭代中,我们从 “候选集” 中选择距离起点最短路长度最小的节点,由于该点不存在更优解,所以可以用该点来 “松弛” 相邻节点。
- 1、确定集:已确定(从起点开始)到当前节点最短路径的节点;
- 2、候选集:未确定(从起点开始)到当前节点最短路径的节点。
技巧:使用较大的整数 0x3F3F3F3F 代替整数最大值 Integer.MAX_VALUE 可以减少加法越界判断。
class Graph(val n: Int, edges: Array<IntArray>) {
private val INF = 0x3F3F3F3F
// 带权有向图(临接矩阵)
private val graph = Array(n) { IntArray(n) { INF } }
init {
// i 自旋的路径长度
for (i in 0 until n) {
graph[i][i] = 0
}
// i 直达 j 的路径长度
for (edge in edges) {
addEdge(edge)
}
}
fun addEdge(edge: IntArray) {
graph[edge[0]][edge[1]] = edge[2]
}
fun shortestPath(node1: Int, node2: Int): Int {
// Dijkstra
// 最短路
val dst = IntArray(n) { INF }
dst[node1] = 0
// 确定标记
val visited = BooleanArray(n)
// 迭代 n - 1 次
for (count in 0 until n - 1) {
// 寻找候选集中最短路长度最短的节点
var x = -1
for (i in 0 until n) {
if (!visited[i] && (-1 == x || dst[i] < dst[x])) x = i
}
// start 可达的节点都访问过 || 已确定 node1 -> node2 的最短路
if (-1 == x || dst[x] == INF || x == node2) break
visited[x] = true
// 松弛相邻节点
for (y in 0 until n) {
dst[y] = Math.min(dst[y], dst[x] + graph[x][y])
}
}
return if (INF == dst[node2]) -1 else dst[node2]
}
}
复杂度分析:
- 时间复杂度:KaTeX parse error: Expected 'EOF', got '·' at position 10: O(m + q_1·̲n^2 + q_2) 其中 n 为节点数量,m 为边数量,q1q_1q1 为查询次数,q2q_2q2 为添加边次数。建图时间 O(m),每个节点访问 n 次;
- 空间复杂度:O(n2+n)O(n^2 + n)O(n2+n) 图空间 + 最短路数组
题解二(Dijkstra + 最小堆)
这道题是稠密图,朴素 Dijkstra 由于 Dijkstra + 最小堆。
朴素 Dijkstra 的每轮迭代中需要遍历 n 个节点寻找候选集中的最短路长度。事实上,这 n 个节点中有部分是 ”确定集“,有部分是远离起点的边缘节点,每一轮都遍历显得没有必要。我们使用小顶堆记录候选集中最近深度的节点。
class Graph(val n: Int, edges: Array<IntArray>) {
private val INF = 0x3F3F3F3F
// 带权有向图(临接矩阵)
private val graph = Array(n) { IntArray(n) { INF } }
init {
// i 自旋的路径长度
for (i in 0 until n) {
graph[i][i] = 0
}
// i 直达 j 的路径长度
for (edge in edges) {
addEdge(edge)
}
}
fun addEdge(edge: IntArray) {
graph[edge[0]][edge[1]] = edge[2]
}
fun shortestPath(node1: Int, node2: Int): Int {
// Dijkstra + 最小堆
// 最短路
val dst = IntArray(n) { INF }
dst[node1] = 0
val heap = PriorityQueue<Int>() { i1, i2 ->
dst[i1] - dst[i2]
}
heap.offer(node1)
while (!heap.isEmpty()) {
// 使用 O(lgm) 时间找出最短路长度
var x = heap.poll()
// 松弛相邻节点
for (y in 0 until n) {
if (dst[x] + graph[x][y] < dst[y]) {
dst[y] = dst[x] + graph[x][y]
heap.offer(y)
}
}
}
return if (INF == dst[node2]) -1 else dst[node2]
}
}
复杂度分析:
- 时间复杂度:KaTeX parse error: Expected 'EOF', got '·' at position 10: O(m + q_1·̲nlgm+q_2) 其中 n 为节点数量,m 为边数量,q1q_1q1 为查询次数,q2q_2q2 为添加边次数。建图时间 O(m)O(m)O(m),每条边都会访问一次,每轮迭代取堆顶 O(lgm)。这道题边数大于点数,朴素写法更优。
- 空间复杂度:O(n2+n)O(n^2 + n)O(n2+n) 图空间 + 堆空间。
题解三(Floyd)
Fload 算法的本质是贪心 + BFS,我们需要三层循环枚举中转点 i、枚举起点 j 和枚举终点 k,如果 dst[i][k] + dst[k][j] < dst[i][j],则可以松弛 dst[i][j]。
这道题的另一个关键点在于支持调用 addEdge() 动态添加边,所以使用 Floyd 算法时要考虑如何更新存量图。
class Graph(val n: Int, edges: Array<IntArray>) {
val INF = 0x3F3F3F3F
// 路径长度(带权有向图)
val graph = Array(n) { IntArray(n) { INF } }
init {
// i 自旋的路径长度
for (i in 0 until n) {
graph[i][i] = 0
}
// i 直达 j 的路径长度
for (edge in edges) {
graph[edge[0]][edge[1]] = edge[2]
}
// Floyd 算法
// 枚举中转点
for (k in 0 until n) {
// 枚举起点
for (i in 0 until n) {
// 枚举终点
for (j in 0 until n) {
// 比较 <i to j> 与 <i to p> + <p to j>
graph[i][j] = Math.min(graph[i][j], graph[i][k] + graph[k][j])
}
}
}
}
fun addEdge(edge: IntArray) {
val (x, y, cost) = edge
// 直达
graph[x][y] = Math.min(graph[x][y], cost)
// 枚举中转点
for (k in intArrayOf(x, y)) {
// 枚举起点
for (i in 0 until n) {
// 枚举终点
for (j in 0 until n) {
// 比较 <i to j> 与 <i to k> + <k to j>
graph[i][j] = Math.min(graph[i][j], graph[i][k] + graph[k][j])
}
}
}
}
fun shortestPath(node1: Int, node2: Int): Int {
return if (graph[node1][node2] == INF) -1 else graph[node1][node2]
}
}
复杂度分析:
- 时间复杂度:KaTeX parse error: Expected 'EOF', got '·' at position 22: …n^3 + q_1 + q_2·̲n^2) 其中 nnn 为节点数量,mmm 为边数量,q1q_1q1 为查询次数,q2q_2q2 为添加边次数。建图时间 O(m+n3)O(m + n^3)O(m+n3),单次查询时间 O(1)O(1)O(1),单次添加边时间 O(n2)O(n^2)O(n2);
- 空间复杂度:O(n2)O(n^2)O(n2) 图空间。
相关题目:





